Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiagent Control of Self-reconfigurable Robots
Jun 20, 2000
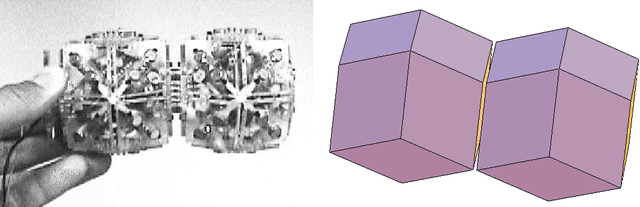
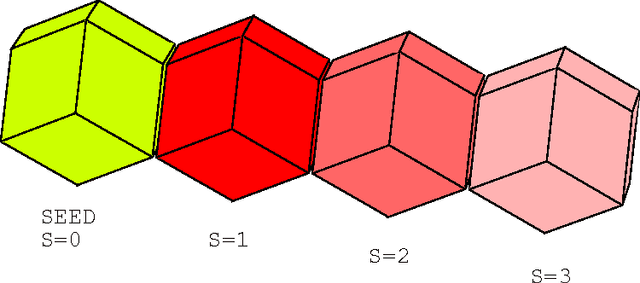

We demonstrate how multiagent systems provide useful control techniques for modular self-reconfigurable (metamorphic) robots. Such robots consist of many modules that can move relative to each other, thereby changing the overall shape of the robot to suit different tasks. Multiagent control is particularly well-suited for tasks involving uncertain and changing environments. We illustrate this approach through simulation experiments of Proteo, a metamorphic robot system currently under development.
* Artificial Intelligence 142:99-120 (2002)
* 15 pages, 10 color figures, including low-resolution photos of prototype hardware
* 15 pages, 10 color figures, including low-resolution photos of prototype hardware
Via