 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplex picking via entanglement of granular mechanical metamaterials
Jul 25, 2024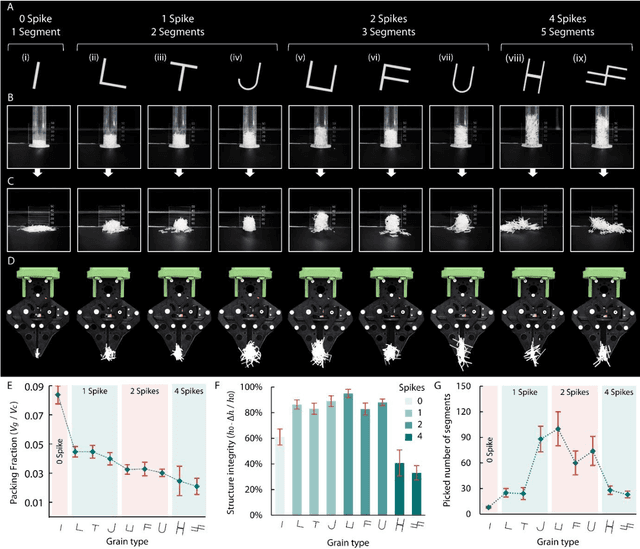
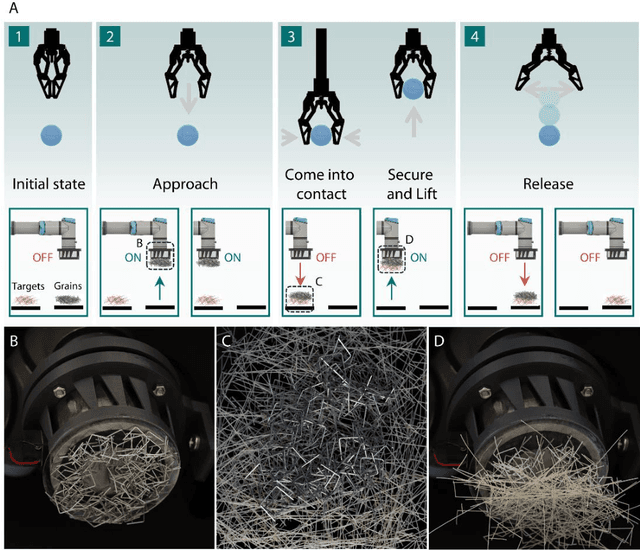
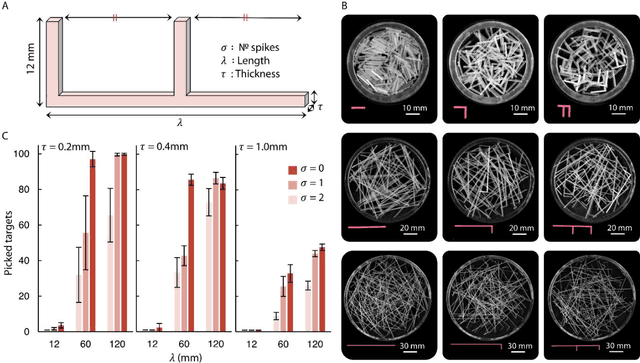
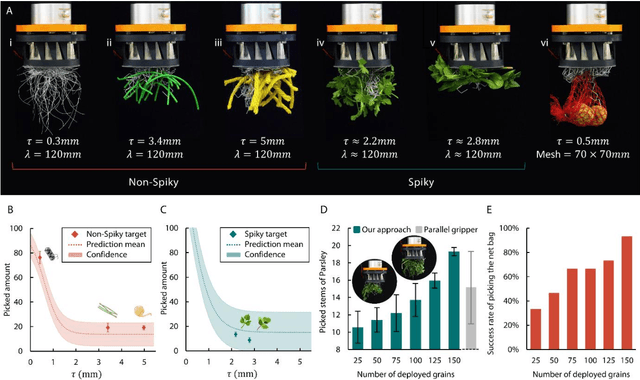
When objects are packed in a cluster, physical interactions are unavoidable. Such interactions emerge because of the objects geometric features; some of these features promote entanglement, while others create repulsion. When entanglement occurs, the cluster exhibits a global, complex behaviour, which arises from the stochastic interactions between objects. We hereby refer to such a cluster as an entangled granular metamaterial. We investigate the geometrical features of the objects which make up the cluster, henceforth referred to as grains, that maximise entanglement. We hypothesise that a cluster composed from grains with high propensity to tangle, will also show propensity to interact with a second cluster of tangled objects. To demonstrate this, we use the entangled granular metamaterials to perform complex robotic picking tasks, where conventional grippers struggle. We employ an electromagnet to attract the metamaterial (ferromagnetic) and drop it onto a second cluster of objects (targets, non-ferromagnetic). When the electromagnet is re-activated, the entanglement ensures that both the metamaterial and the targets are picked, with varying degrees of physical engagement that strongly depend on geometric features. Interestingly, although the metamaterials structural arrangement is random, it creates repeatable and consistent interactions with a second tangled media, enabling robust picking of the latter.
MuA-Ori: Multimodal Actuated Origami
Nov 05, 2021



Recently, inflatable elements integrated in robotics systems have enabled complex motions as a result of simple inputs. However, these fluidic actuators typically exhibit unimodal deformation upon inflation. Here, we present a new design concept for modular, fluidic actuators that can switch between deformation modes as a response to an input threshold. Our system comprises bistable origami modules in which snapping breaks rotational symmetry, giving access to a bending deformation. By tuning geometry, the modules can be designed to snap at different pressure thresholds, rotate clockwise or counterclockwise when actuated, and bend in different planes. Due to their ability to assume multiple deformation modes as response to a single pressure input we call our system MuA-Ori, or Multimodal Actuated Origami. MuA-Ori provides an ideal platform to design actuators that can switch between different configurations, reach multiple, pre-defined targets in space, and move along complex trajectories.