 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeterministic Multi-sensor Measurement-adaptive Birth using Labeled Random Finite Sets
Jul 12, 2023


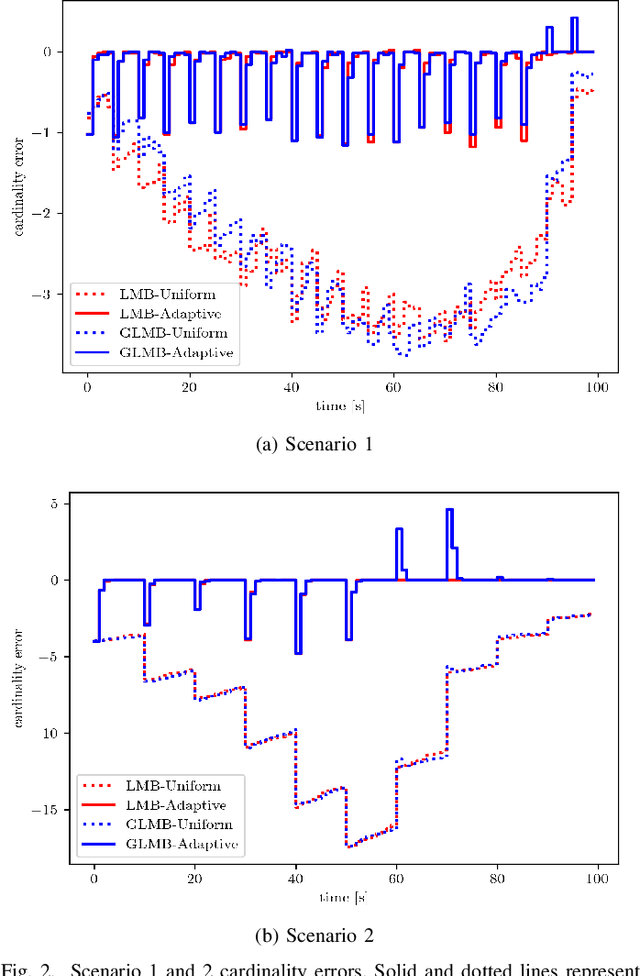
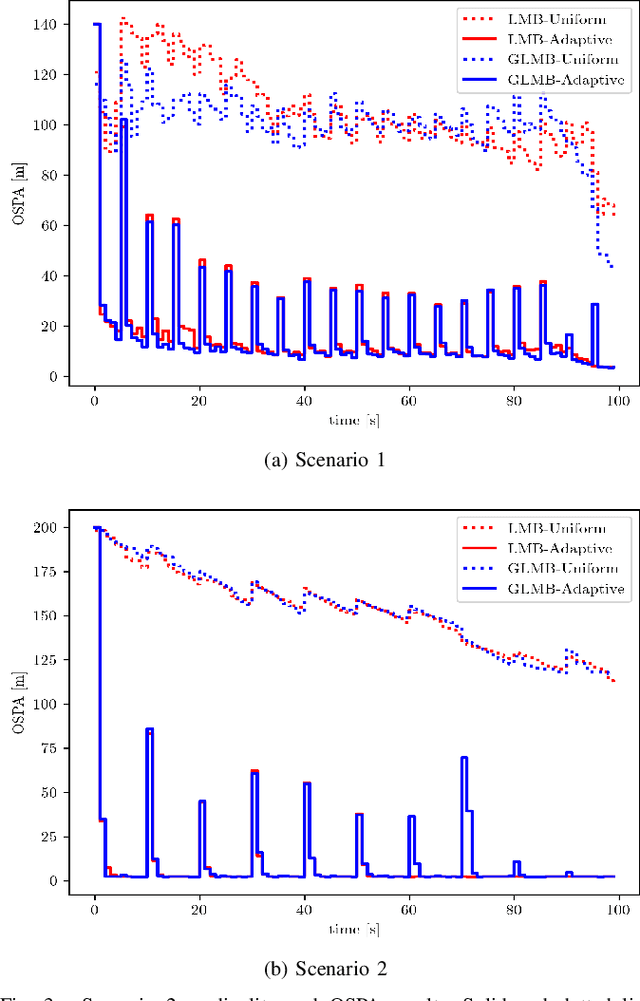
Measurement-adaptive track initiation remains a critical design requirement of many practical multi-target tracking systems. For labeled random finite sets multi-object filters, prior work has been established to construct a labeled multi-object birth density using measurements from multiple sensors. A truncation procedure has also been provided that leverages a stochastic Gibbs sampler to truncate the birth density for scalability. In this work, we introduce a deterministic herded Gibbs sampling truncation solution for efficient multi-sensor adaptive track initialization. Removing the stochastic behavior of the track initialization procedure without impacting average tracking performance enables a more robust tracking solution more suitable for safety-critical applications. Simulation results for linear sensing scenarios are provided to verify performance.
On Gibbs Sampling Architecture for Labeled Random Finite Sets Multi-Object Tracking
Jun 27, 2023Gibbs sampling is one of the most popular Markov chain Monte Carlo algorithms because of its simplicity, scalability, and wide applicability within many fields of statistics, science, and engineering. In the labeled random finite sets literature, Gibbs sampling procedures have recently been applied to efficiently truncate the single-sensor and multi-sensor $\delta$-generalized labeled multi-Bernoulli posterior density as well as the multi-sensor adaptive labeled multi-Bernoulli birth distribution. However, only a limited discussion has been provided regarding key Gibbs sampler architecture details including the Markov chain Monte Carlo sample generation technique and early termination criteria. This paper begins with a brief background on Markov chain Monte Carlo methods and a review of the Gibbs sampler implementations proposed for labeled random finite sets filters. Next, we propose a short chain, multi-simulation sample generation technique that is well suited for these applications and enables a parallel processing implementation. Additionally, we present two heuristic early termination criteria that achieve similar sampling performance with substantially fewer Markov chain observations. Finally, the benefits of the proposed Gibbs samplers are demonstrated via two Monte Carlo simulations.
Multi-sensor Joint Adaptive Birth Sampler for Labeled Random Finite Set Tracking
Aug 11, 2021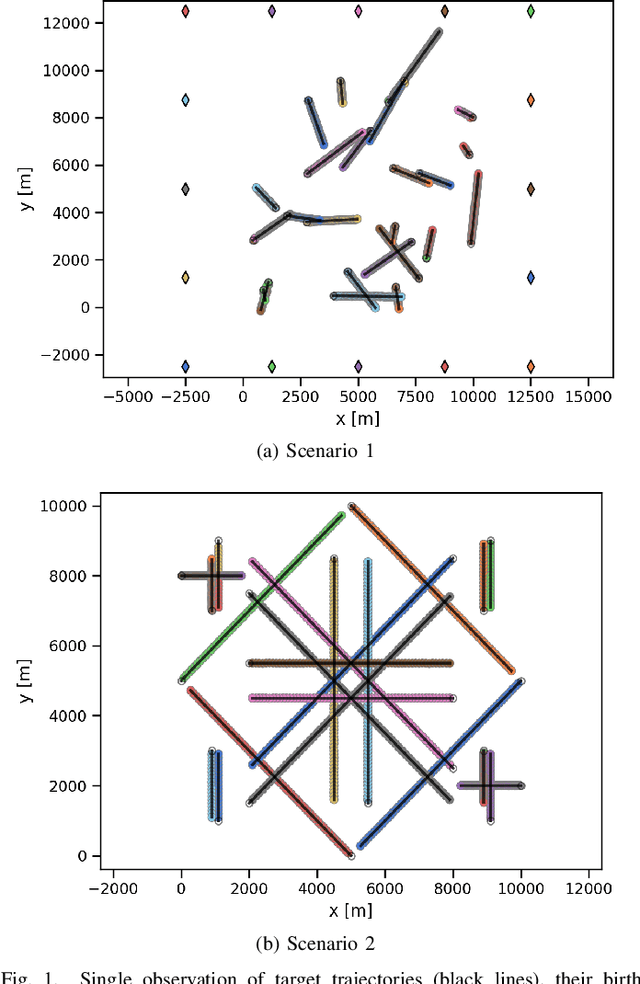
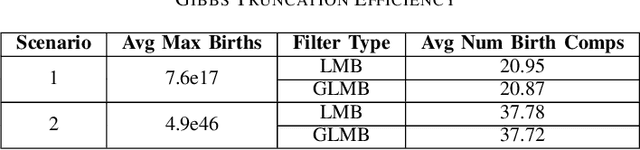
This paper provides a scalable, multi-sensor measurement adaptive track initiation technique for labeled random finite set filters. A naive construction of the multi-sensor measurement adaptive birth set leads to an exponential number of newborn components in the number of sensors. A truncation criterion is established for a multi-sensor measurement-generated labeled multi-Bernoulli random finite set that provably minimizes the L1-truncation error in the generalized labeled multi-Bernoulli posterior distribution. This criterion is used to construct a Gibbs sampler that produces a truncated measurement-generated labeled multi-Bernoulli birth distribution with quadratic complexity in the number of sensors. A closed form solution of the conditional sampling distribution assuming linear (or linearized) Gaussian likelihoods is provided, alongside an approximate solution using Monte Carlo importance sampling. Multiple simulation results are provided to verify the efficacy of the truncation criterion, as well as the reduction in complexity.