 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Circumnavigation of a Hostile Target Using Range-Based Measurements
Jan 11, 2025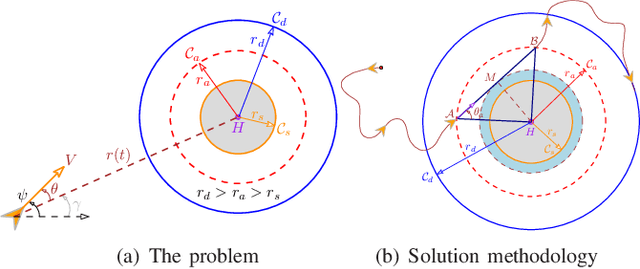
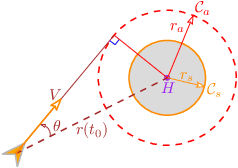
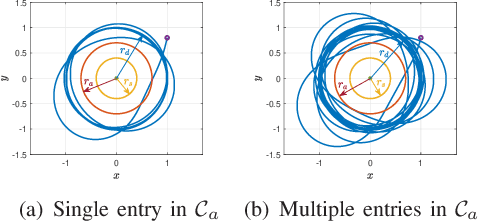
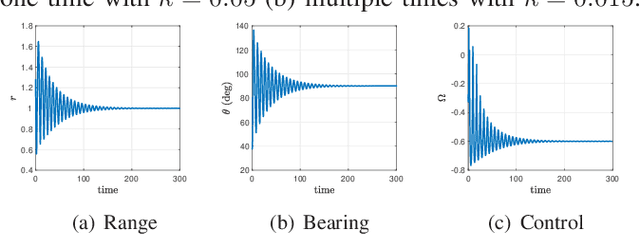
Robotic systems are frequently deployed in missions that are dull, dirty, and dangerous, where ensuring their safety is of paramount importance when designing stabilizing controllers to achieve their desired goals. This paper addresses the problem of safe circumnavigation around a hostile target by a nonholonomic robot, with the objective of maintaining a desired safe distance from the target. Our solution approach involves incorporating an auxiliary circle into the problem formulation, which assists in navigating the robot around the target using available range-based measurements. By leveraging the concept of a barrier Lyapunov function, we propose a novel control law that ensures stable circumnavigation around the target while preventing the robot from entering the safety circle. This controller is designed based on a parameter that depends on the radii of three circles, namely the stabilizing circle, the auxiliary circle, and the safety circle. By identifying an appropriate range for this design parameter, we rigorously prove the stability of the desired equilibrium of the closed-loop system. Additionally, we provide an analysis of the robot's motion within the auxiliary circle, which is influenced by a gain parameter in the proposed controller. Simulation and experimental results are presented to illustrate the key theoretical developments.
Stabilizing Circular Motion Within Nonconcentric Circular Boundary: A Mobius Transformation-Based Approach
May 11, 2024



Nonuniform motion constraints are ubiquitous in robotic applications. Geofencing control is one such paradigm where the motion of a robot must be constrained within a predefined boundary. This paper addresses the problem of stabilizing a unicycle robot around a desired circular orbit while confining its motion within a nonconcentric external circular boundary. Our solution approach relies on the concept of the so-called Mobius transformation that, under certain practical conditions, maps two nonconcentric circles to a pair of concentric circles, and hence, results in uniform spatial motion constraints. The choice of such a Mobius transformation is governed by the roots of a quadratic equation in the post-design analysis that decides how the regions enclosed by the two circles are mapped onto the two planes. We show that the problem can be formulated either as a trajectory-constraining problem or an obstacle-avoidance problem in the transformed plane, depending on these roots. Exploiting the idea of the barrier Lyapunov function, we propose a unique control law that solves both these contrasting problems in the transformed plane and renders a solution to the original problem in the actual plane. By relating parameters of two planes under Mobius transformation and its inverse map, we further establish a connection between the control laws in two planes and determine the control law to be applied in the actual plane. Simulation and experimental results are provided to illustrate the key theoretical developments.