 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Prediction of Automotive Collision Risk from Monocular Video
Feb 04, 2019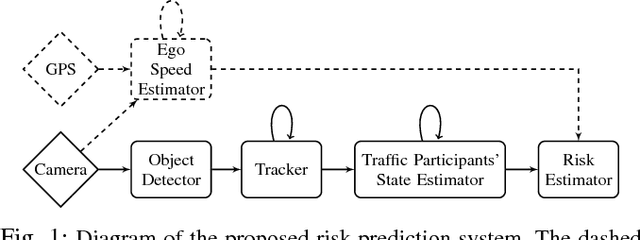
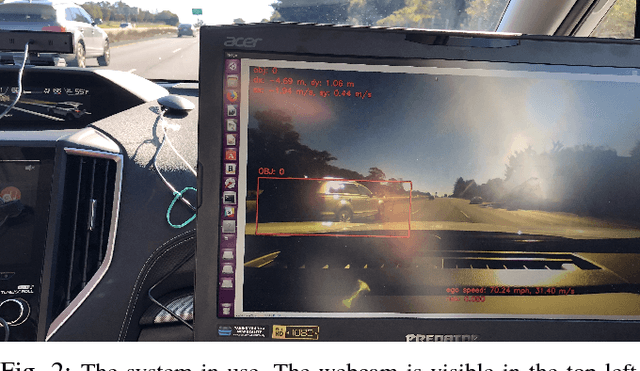
Many automotive applications, such as Advanced Driver Assistance Systems (ADAS) for collision avoidance and warnings, require estimating the future automotive risk of a driving scene. We present a low-cost system that predicts the collision risk over an intermediate time horizon from a monocular video source, such as a dashboard-mounted camera. The modular system includes components for object detection, object tracking, and state estimation. We introduce solutions to the object tracking and distance estimation problems. Advanced approaches to the other tasks are used to produce real-time predictions of the automotive risk for the next 10 s at over 5 Hz. The system is designed such that alternative components can be substituted with minimal effort. It is demonstrated on common physical hardware, specifically an off-the-shelf gaming laptop and a webcam. We extend the framework to support absolute speed estimation and more advanced risk estimation techniques.