 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlexa, Let's Work Together: Introducing the First Alexa Prize TaskBot Challenge on Conversational Task Assistance
Sep 13, 2022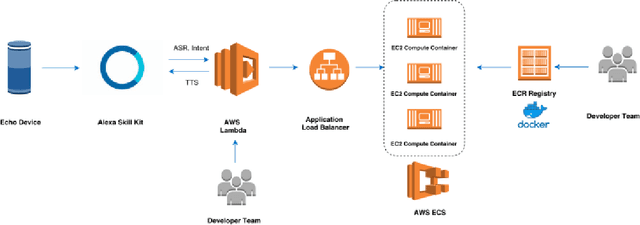
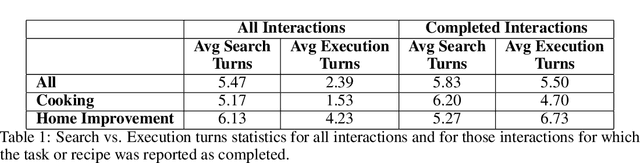
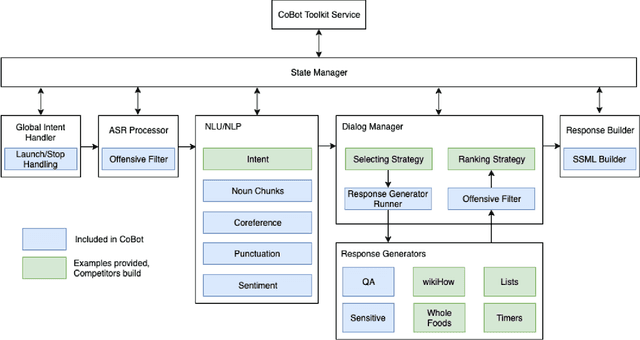
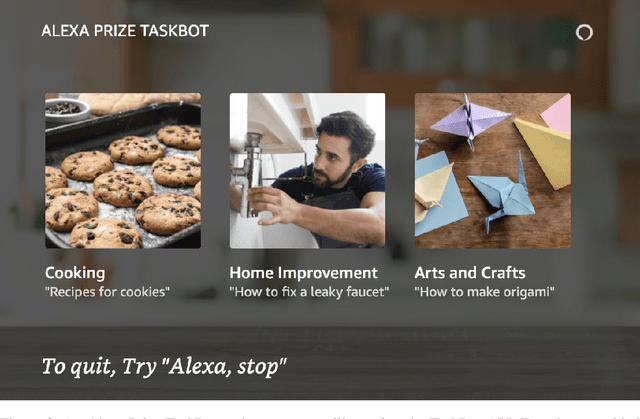
Since its inception in 2016, the Alexa Prize program has enabled hundreds of university students to explore and compete to develop conversational agents through the SocialBot Grand Challenge. The goal of the challenge is to build agents capable of conversing coherently and engagingly with humans on popular topics for 20 minutes, while achieving an average rating of at least 4.0/5.0. However, as conversational agents attempt to assist users with increasingly complex tasks, new conversational AI techniques and evaluation platforms are needed. The Alexa Prize TaskBot challenge, established in 2021, builds on the success of the SocialBot challenge by introducing the requirements of interactively assisting humans with real-world Cooking and Do-It-Yourself tasks, while making use of both voice and visual modalities. This challenge requires the TaskBots to identify and understand the user's need, identify and integrate task and domain knowledge into the interaction, and develop new ways of engaging the user without distracting them from the task at hand, among other challenges. This paper provides an overview of the TaskBot challenge, describes the infrastructure support provided to the teams with the CoBot Toolkit, and summarizes the approaches the participating teams took to overcome the research challenges. Finally, it analyzes the performance of the competing TaskBots during the first year of the competition.
Enabling Pedestrian Safety using Computer Vision Techniques: A Case Study of the 2018 Uber Inc. Self-driving Car Crash
May 30, 2018
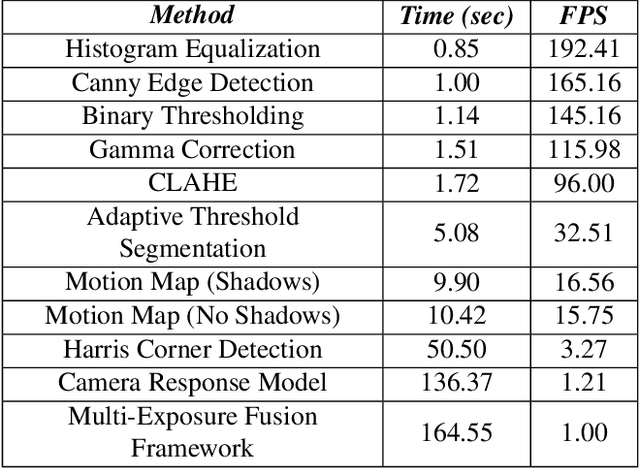

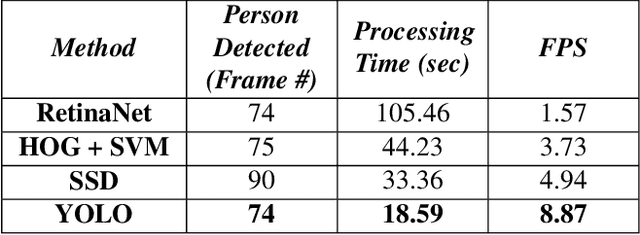
Human lives are important. The decision to allow self-driving vehicles operate on our roads carries great weight. This has been a hot topic of debate between policy-makers, technologists and public safety institutions. The recent Uber Inc. self-driving car crash, resulting in the death of a pedestrian, has strengthened the argument that autonomous vehicle technology is still not ready for deployment on public roads. In this work, we analyze the Uber car crash and shed light on the question, "Could the Uber Car Crash have been avoided?". We apply state-of-the-art Computer Vision models to this highly practical scenario. More generally, our experimental results are an evaluation of various image enhancement and object recognition techniques for enabling pedestrian safety in low-lighting conditions using the Uber crash as a case study.