 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnveiling Ancient Maya Settlements Using Aerial LiDAR Image Segmentation
Mar 09, 2024



Manual identification of archaeological features in LiDAR imagery is labor-intensive, costly, and requires archaeological expertise. This paper shows how recent advancements in deep learning (DL) present efficient solutions for accurately segmenting archaeological structures in aerial LiDAR images using the YOLOv8 neural network. The proposed approach uses novel pre-processing of the raw LiDAR data and dataset augmentation methods to produce trained YOLOv8 networks to improve accuracy, precision, and recall for the segmentation of two important Maya structure types: annular structures and platforms. The results show an IoU performance of 0.842 for platforms and 0.809 for annular structures which outperform existing approaches. Further, analysis via domain experts considers the topological consistency of segmented regions and performance vs. area providing important insights. The approach automates time-consuming LiDAR image labeling which significantly accelerates accurate analysis of historical landscapes.
UAV-borne Mapping Algorithms for Canopy-Level and High-Speed Drone Applications
Jan 12, 2024This article presents a comprehensive review of and analysis of state-of-the-art mapping algorithms for UAV (Unmanned Aerial Vehicle) applications, focusing on canopy-level and high-speed scenarios. This article presents a comprehensive exploration of sensor technologies suitable for UAV mapping, assessing their capabilities to provide measurements that meet the requirements of fast UAV mapping. Furthermore, the study conducts extensive experiments in a simulated environment to evaluate the performance of three distinct mapping algorithms: Direct Sparse Odometry (DSO), Stereo DSO (SDSO), and DSO Lite (DSOL). The experiments delve into mapping accuracy and mapping speed, providing valuable insights into the strengths and limitations of each algorithm. The results highlight the versatility and shortcomings of these algorithms in meeting the demands of modern UAV applications. The findings contribute to a nuanced understanding of UAV mapping dynamics, emphasizing their applicability in complex environments and high-speed scenarios. This research not only serves as a benchmark for mapping algorithm comparisons but also offers practical guidance for selecting sensors tailored to specific UAV mapping applications.
ROS georegistration: Aerial Multi-spectral Image Simulator for the Robot Operating System
Jan 19, 2022



This article describes a software package called ROS georegistration intended for use with the Robot Operating System (ROS) and the Gazebo 3D simulation environment. ROSgeoregistration provides tools for the simulation, test and deployment of aerial georegistration algorithms and is made available with a link provided in the paper. A model creation package is provided which downloads multi-spectral images from the Google Earth Engine database and, if necessary, incorporates these images into a single, possibly very large, reference image. Additionally a Gazebo plugin which uses the real-time sensor pose and image formation model to generate simulated imagery using the specified reference image is provided along with related plugins for UAV relevant data. The novelty of this work is threefold: (1) this is the first system to link the massive multi-spectral imaging database of Google's Earth Engine to the Gazebo simulator, (2) this is the first example of a system that can simulate geospatially and radiometrically accurate imagery from multiple sensor views of the same terrain region, and (3) integration with other UAS tools creates a new holistic UAS simulation environment to support UAS system and subsystem development where real-world testing would generally be prohibitive. Sensed imagery and ground truth registration information is published to client applications which can receive imagery synchronously with telemetry from other payload sensors, e.g., IMU, GPS/GNSS, barometer, and windspeed sensor data. To highlight functionality, we demonstrate ROSgeoregistration for simulating Electro-Optical (EO) and Synthetic Aperture Radar (SAR) image sensors and an example use case for developing and evaluating image-based UAS position feedback, i.e., pose for image-based Guidance Navigation and Control (GNC) applications.
Real-Time Surface Fitting to RGBD Sensor Data
Mar 11, 2021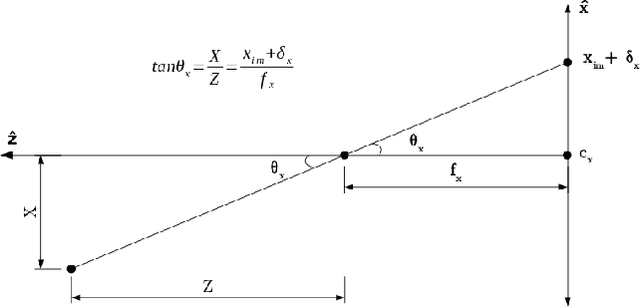
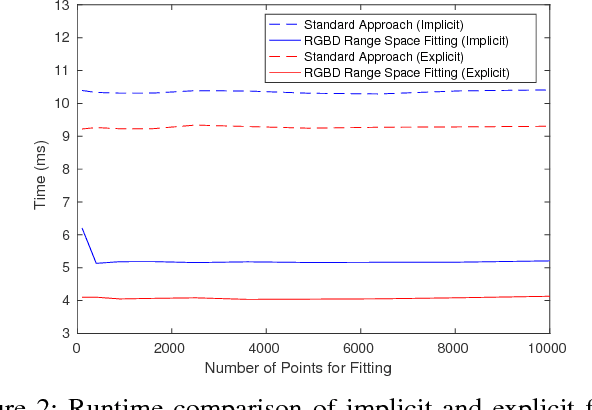
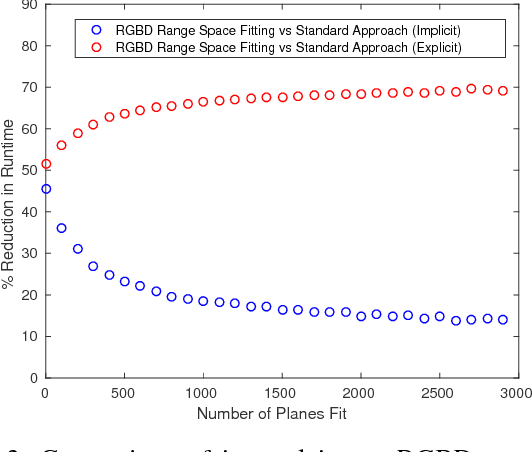
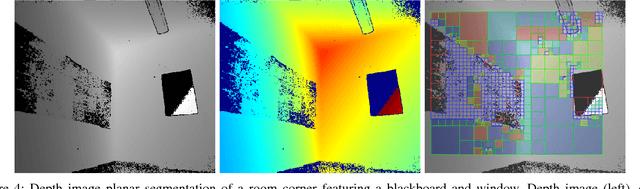
This article describes novel approaches to quickly estimate planar surfaces from RGBD sensor data. The approach manipulates the standard algebraic fitting equations into a form that allows many of the needed regression variables to be computed directly from the camera calibration information. As such, much of the computational burden required by a standard algebraic surface fit can be pre-computed. This provides a significant time and resource savings, especially when many surface fits are being performed which is often the case when RGBD point-cloud data is being analyzed for normal estimation, curvature estimation, polygonization or 3D segmentation applications. Using an integral image implementation, the proposed approaches show a significant increase in performance compared to the standard algebraic fitting approaches.
Real-Time RGBD Odometry for Fused-State Navigation Systems
Mar 10, 2021

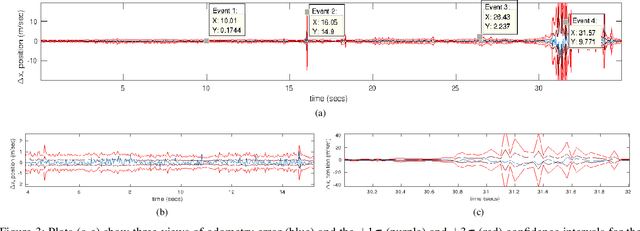

This article describes an algorithm that provides visual odometry estimates from sequential pairs of RGBD images. The key contribution of this article on RGBD odometry is that it provides both an odometry estimate and a covariance for the odometry parameters in real-time via a representative covariance matrix. Accurate, real-time parameter covariance is essential to effectively fuse odometry measurements into most navigation systems. To date, this topic has seen little treatment in research which limits the impact existing RGBD odometry approaches have for localization in these systems. Covariance estimates are obtained via a statistical perturbation approach motivated by real-world models of RGBD sensor measurement noise. Results discuss the accuracy of our RGBD odometry approach with respect to ground truth obtained from a motion capture system and characterizes the suitability of this approach for estimating the true RGBD odometry parameter uncertainty.
Maplets: An Efficient Approach for Cooperative SLAM Map Building Under Communication and Computation Constraints
May 20, 2020
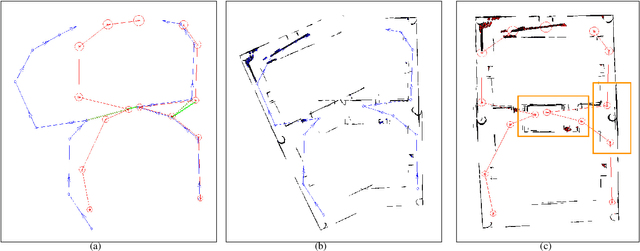
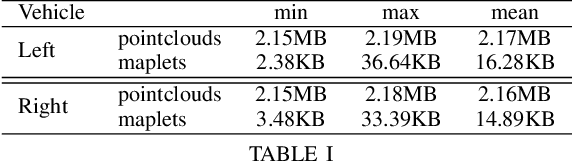
This article introduces an approach to facilitate cooperative exploration and mapping of large-scale, near-ground, underground, or indoor spaces via a novel integration framework for locally-dense agent map data. The effort targets limited Size, Weight, and Power (SWaP) agents with an emphasis on limiting required communications and redundant processing. The approach uses a unique organization of batch optimization engines to enable a highly efficient two-tier optimization structure. Tier I consist of agents that create and potentially share local maplets (local maps, limited in size) which are generated using Simultaneous Localization and Mapping (SLAM) map-building software and then marginalized to a more compact parameterization. Maplets are generated in an overlapping manner and used to estimate the transform and uncertainty between those overlapping maplets, providing accurate and compact odometry or delta-pose representation between maplet's local frames. The delta poses can be shared between agents, and in cases where maplets have salient features (for loop closures), the compact representation of the maplet can also be shared. The second optimization tier consists of a global optimizer that seeks to optimize those maplet-to-maplet transformations, including any loop closures identified. This can provide an accurate global "skeleton"' of the traversed space without operating on the high-density point cloud. This compact version of the map data allows for scalable, cooperative exploration with limited communication requirements where most of the individual maplets, or low fidelity renderings, are only shared if desired.
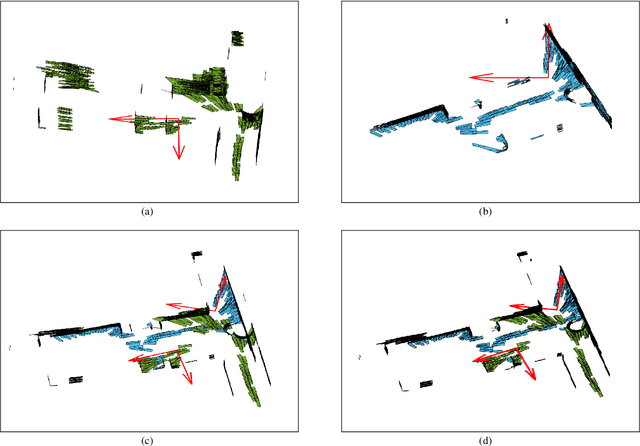
Compute-Bound and Low-Bandwidth Distributed 3D Graph-SLAM
May 20, 2020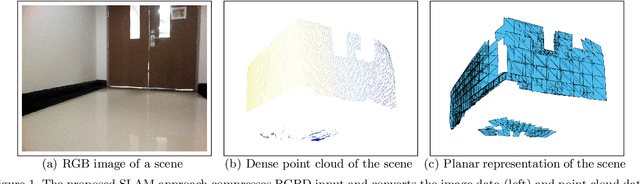

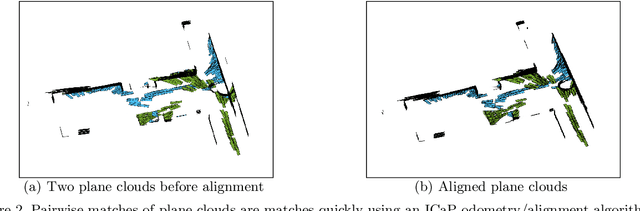
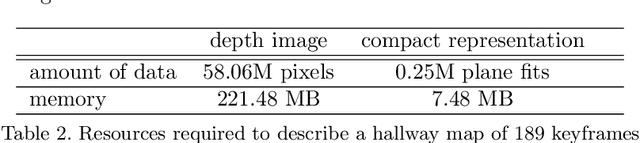
This article describes a new approach for distributed 3D SLAM map building. The key contribution of this article is the creation of a distributed graph-SLAM map-building architecture responsive to bandwidth and computational needs of the robotic platform. Responsiveness is afforded by the integration of a 3D point cloud to plane cloud compression algorithm that approximates dense 3D point cloud using local planar patches. Compute bound platforms may restrict the computational duration of the compression algorithm and low-bandwidth platforms can restrict the size of the compression result. The backbone of the approach is an ultra-fast adaptive 3D compression algorithm that transforms swaths of 3D planar surface data into planar patches attributed with image textures. Our approach uses DVO SLAM, a leading algorithm for 3D mapping, and extends it by computationally isolating map integration tasks from local Guidance, Navigation, and Control tasks and includes an addition of a network protocol to share the compressed plane clouds. The joint effect of these contributions allows agents with 3D sensing capabilities to calculate and communicate compressed map information commensurate with their onboard computational resources and communication channel capacities. This opens SLAM mapping to new categories of robotic platforms that may have computational and memory limits that prohibit other SLAM solutions.