 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-in-the-Loop Testing of AI Agents for Air Traffic Control with a Regulated Assessment Framework
Jan 07, 2026We present a rigorous, human-in-the-loop evaluation framework for assessing the performance of AI agents on the task of Air Traffic Control, grounded in a regulator-certified simulator-based curriculum used for training and testing real-world trainee controllers. By leveraging legally regulated assessments and involving expert human instructors in the evaluation process, our framework enables a more authentic and domain-accurate measurement of AI performance. This work addresses a critical gap in the existing literature: the frequent misalignment between academic representations of Air Traffic Control and the complexities of the actual operational environment. It also lays the foundations for effective future human-machine teaming paradigms by aligning machine performance with human assessment targets.
Decoupled limbs yield differentiable trajectory outcomes through intermittent contact in locomotion and manipulation
May 23, 2017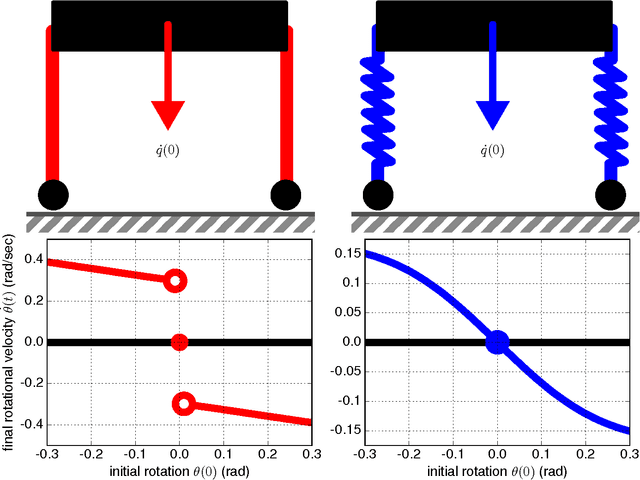
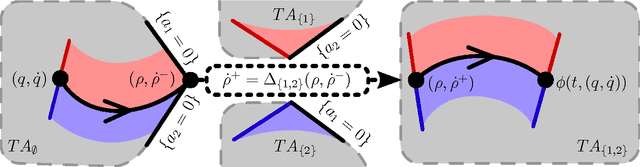
When limbs are decoupled, we find that trajectory outcomes in mechanical systems subject to unilateral constraints vary differentiably with respect to initial conditions, even as the contact mode sequence varies.