Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePiecewise-differentiable trajectory outcomes in mechanical systems subject to unilateral constraints
Oct 17, 2016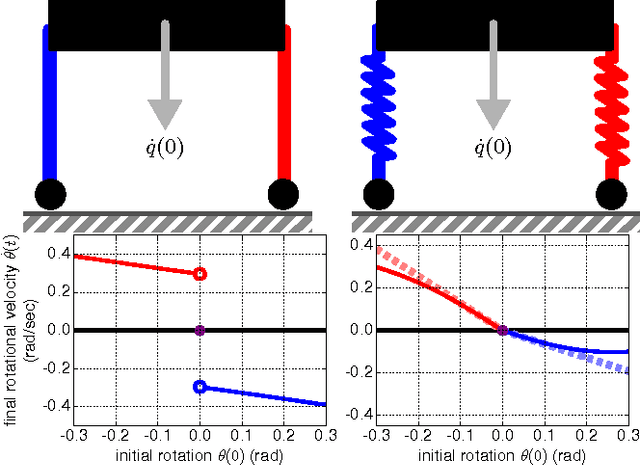
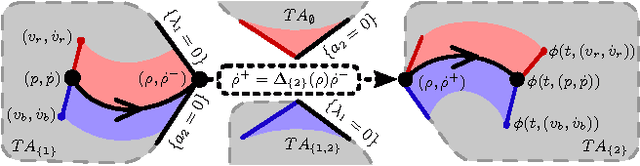
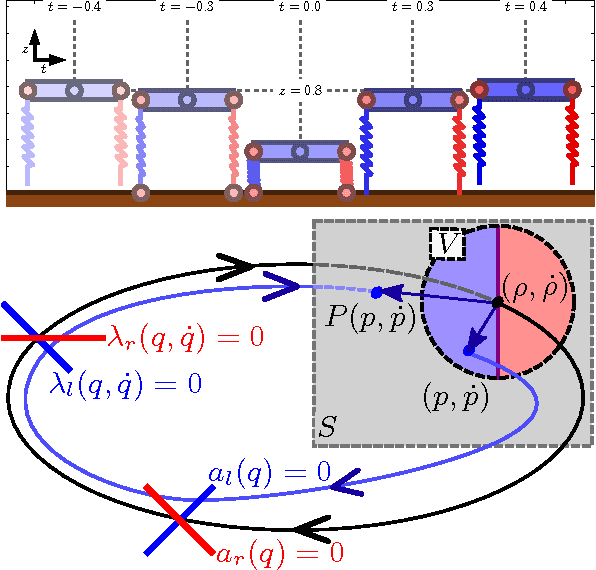
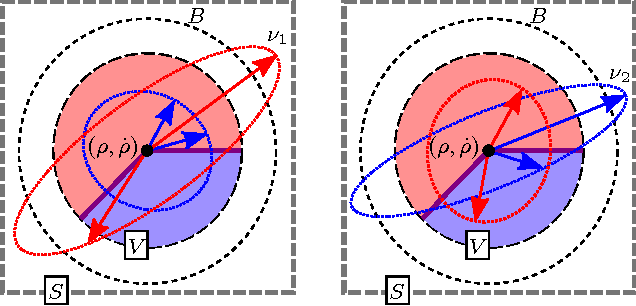
We provide conditions under which trajectory outcomes in mechanical systems subject to unilateral constraints depend piecewise-differentiably on initial conditions, even as the sequence of constraint activations and deactivations varies. This builds on prior work that provided conditions ensuring existence, uniqueness, and continuity of trajectory outcomes, and extends previous differentiability results that applied only to fixed constraint (de)activation sequences. We discuss extensions of our result and implications for assessing stability and controllability.
* arXiv admin note: text overlap with arXiv:1609.04056
Via