 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePogoDrone: Design, Model, and Control of a Jumping Quadrotor
Apr 01, 2022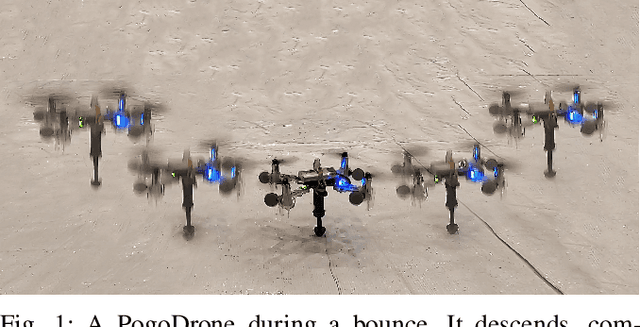



We present a design, model, and control for a novel jumping-flying robot that is called PogoDrone. The robot is composed of a quadrotor with a passive mechanism for jumping. The robot can continuously jump in place or fly like a normal quadrotor. Jumping in place allows the robot to quickly move and operate very close to the ground. For instance, in agricultural applications, the jumping mechanism allows the robot to take samples of soil. We propose a hybrid controller that switches from attitude to position control to allow the robot to fall horizontally and recover to the original position. We compare the jumping mode with the hovering mode to analyze the energy consumption. In simulations, we evaluate the effect of different factors on energy consumption. In real experiments, we show that our robot can repeatedly impact the ground, jump, and fly in a physical environment.