 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraining RL Agents for Multi-Objective Network Defense Tasks
May 28, 2025Open-ended learning (OEL) -- which emphasizes training agents that achieve broad capability over narrow competency -- is emerging as a paradigm to develop artificial intelligence (AI) agents to achieve robustness and generalization. However, despite promising results that demonstrate the benefits of OEL, applying OEL to develop autonomous agents for real-world cybersecurity applications remains a challenge. We propose a training approach, inspired by OEL, to develop autonomous network defenders. Our results demonstrate that like in other domains, OEL principles can translate into more robust and generalizable agents for cyber defense. To apply OEL to network defense, it is necessary to address several technical challenges. Most importantly, it is critical to provide a task representation approach over a broad universe of tasks that maintains a consistent interface over goals, rewards and action spaces. This way, the learning agent can train with varying network conditions, attacker behaviors, and defender goals while being able to build on previously gained knowledge. With our tools and results, we aim to fundamentally impact research that applies AI to solve cybersecurity problems. Specifically, as researchers develop gyms and benchmarks for cyber defense, it is paramount that they consider diverse tasks with consistent representations, such as those we propose in our work.
Evaluating Automated Driving Planner Robustness against Adversarial Influence
May 29, 2022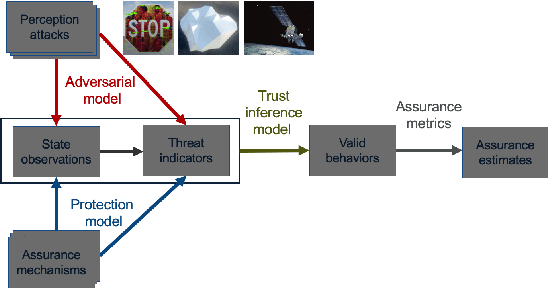

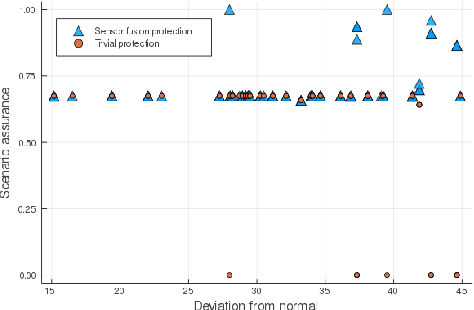

Evaluating the robustness of automated driving planners is a critical and challenging task. Although methodologies to evaluate vehicles are well established, they do not yet account for a reality in which vehicles with autonomous components share the road with adversarial agents. Our approach, based on probabilistic trust models, aims to help researchers assess the robustness of protections for machine learning-enabled planners against adversarial influence. In contrast with established practices that evaluate safety using the same evaluation dataset for all vehicles, we argue that adversarial evaluation fundamentally requires a process that seeks to defeat a specific protection. Hence, we propose that evaluations be based on estimating the difficulty for an adversary to determine conditions that effectively induce unsafe behavior. This type of inference requires precise statements about threats, protections, and aspects of planning decisions to be guarded. We demonstrate our approach by evaluating protections for planners relying on camera-based object detectors.
Network Defense is Not a Game
Apr 20, 2021

Research seeks to apply Artificial Intelligence (AI) to scale and extend the capabilities of human operators to defend networks. A fundamental problem that hinders the generalization of successful AI approaches -- i.e., beating humans at playing games -- is that network defense cannot be defined as a single game with a fixed set of rules. Our position is that network defense is better characterized as a collection of games with uncertain and possibly drifting rules. Hence, we propose to define network defense tasks as distributions of network environments, to: (i) enable research to apply modern AI techniques, such as unsupervised curriculum learning and reinforcement learning for network defense; and, (ii) facilitate the design of well-defined challenges that can be used to compare approaches for autonomous cyberdefense. To demonstrate that an approach for autonomous network defense is practical it is important to be able to reason about the boundaries of its applicability. Hence, we need to be able to define network defense tasks that capture sets of adversarial tactics, techniques, and procedures (TTPs); quality of service (QoS) requirements; and TTPs available to defenders. Furthermore, the abstractions to define these tasks must be extensible; must be backed by well-defined semantics that allow us to reason about distributions of environments; and should enable the generation of data and experiences from which an agent can learn. Our approach named Network Environment Design for Autonomous Cyberdefense inspired the architecture of FARLAND, a Framework for Advanced Reinforcement Learning for Autonomous Network Defense, which we use at MITRE to develop RL network defenders that perform blue actions from the MITRE Shield matrix against attackers with TTPs that drift from MITRE ATT&CK TTPs.