 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-wise rational model for structured light system
May 11, 2023This Letter presents a novel structured light system model that effectively considers local lens distortion by pixel-wise rational functions. We leverage the stereo method for initial calibration and then estimate the rational model for each pixel. Our proposed model can achieve high measurement accuracy within and outside the calibration volume, demonstrating its robustness and accuracy.
* 4 pages, 5 figures
Corneal endothelium assessment in specular microscopy images with Fuchs' dystrophy via deep regression of signed distance maps
Oct 13, 2022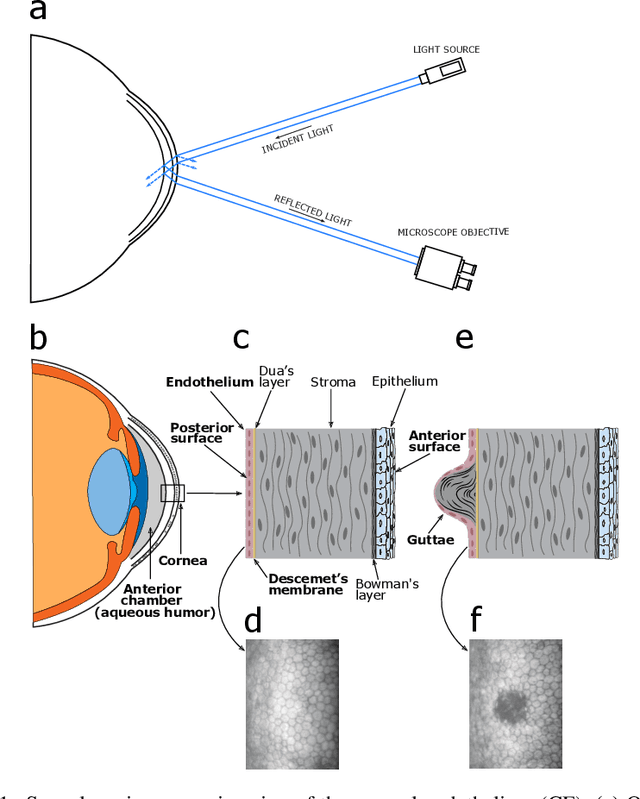
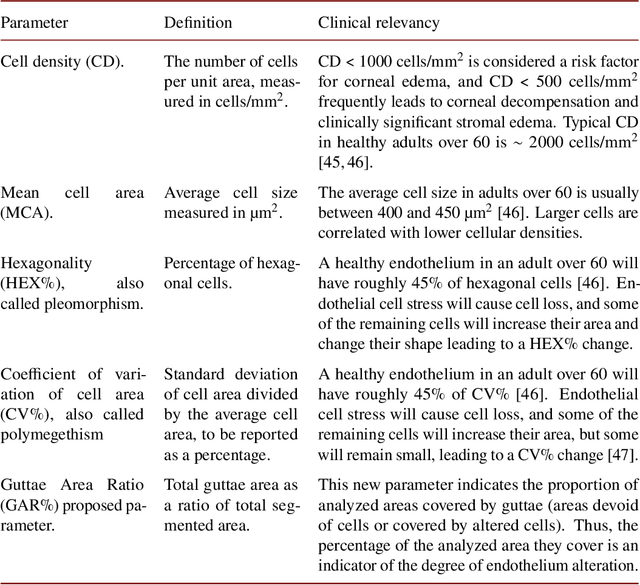
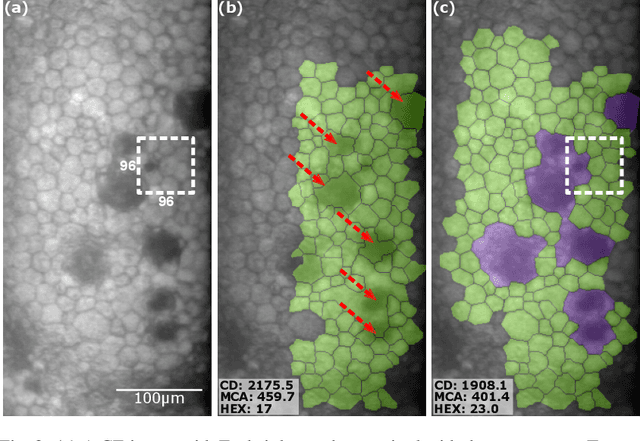
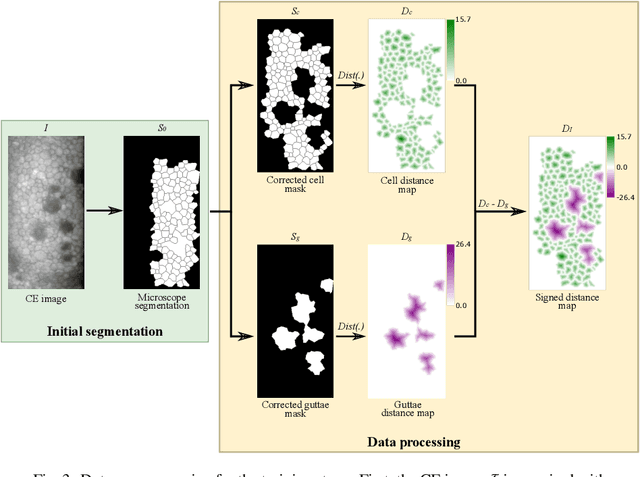
Specular microscopy assessment of the human corneal endothelium (CE) in Fuchs' dystrophy is challenging due to the presence of dark image regions called guttae. This paper proposes a UNet-based segmentation approach that requires minimal post-processing and achieves reliable CE morphometric assessment and guttae identification across all degrees of Fuchs' dystrophy. We cast the segmentation problem as a regression task of the cell and gutta signed distance maps instead of a pixel-level classification task as typically done with UNets. Compared to the conventional UNet classification approach, the distance-map regression approach converges faster in clinically relevant parameters. It also produces morphometric parameters that agree with the manually-segmented ground-truth data, namely the average cell density difference of -41.9 cells/mm2 (95% confidence interval (CI) [-306.2, 222.5]) and the average difference of mean cell area of 14.8 um2 (95% CI [-41.9, 71.5]). These results suggest a promising alternative for CE assessment.
MarkerPose: Robust Real-time Planar Target Tracking for Accurate Stereo Pose Estimation
May 29, 2021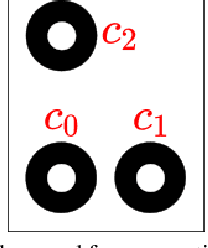
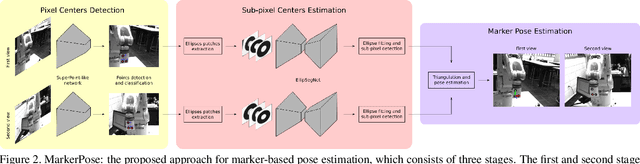
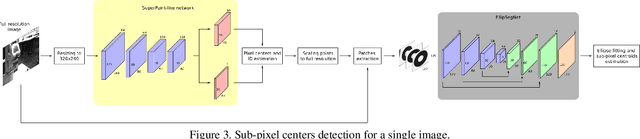
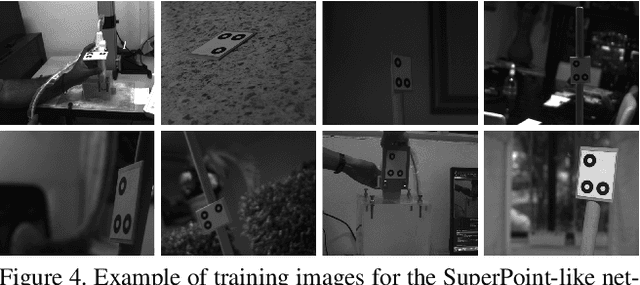
Despite the attention marker-less pose estimation has attracted in recent years, marker-based approaches still provide unbeatable accuracy under controlled environmental conditions. Thus, they are used in many fields such as robotics or biomedical applications but are primarily implemented through classical approaches, which require lots of heuristics and parameter tuning for reliable performance under different environments. In this work, we propose MarkerPose, a robust, real-time pose estimation system based on a planar target of three circles and a stereo vision system. MarkerPose is meant for high-accuracy pose estimation applications. Our method consists of two deep neural networks for marker point detection. A SuperPoint-like network for pixel-level accuracy keypoint localization and classification, and we introduce EllipSegNet, a lightweight ellipse segmentation network for sub-pixel-level accuracy keypoint detection. The marker's pose is estimated through stereo triangulation. The target point detection is robust to low lighting and motion blur conditions. We compared MarkerPose with a detection method based on classical computer vision techniques using a robotic arm for validation. The results show our method provides better accuracy than the classical technique. Finally, we demonstrate the suitability of MarkerPose in a 3D freehand ultrasound system, which is an application where highly accurate pose estimation is required. Code is available in Python and C++ at https://github.com/jhacsonmeza/MarkerPose.
Three-dimensional multimodal medical imaging system based on free-hand ultrasound and structured light
May 29, 2021We propose a three-dimensional (3D) multimodal medical imaging system that combines freehand ultrasound and structured light 3D reconstruction in a single coordinate system without requiring registration. To the best of our knowledge, these techniques have not been combined before as a multimodal imaging technique. The system complements the internal 3D information acquired with ultrasound, with the external surface measured with the structure light technique. Moreover, the ultrasound probe's optical tracking for pose estimation was implemented based on a convolutional neural network. Experimental results show the system's high accuracy and reproducibility, as well as its potential for preoperative and intraoperative applications. The experimental multimodal error, or the distance from two surfaces obtained with different modalities, was 0.12 mm. The code is available as a Github repository.
Hybrid calibration procedure for fringe projection profilometry based on stereo-vision and polynomial fitting
Mar 09, 2020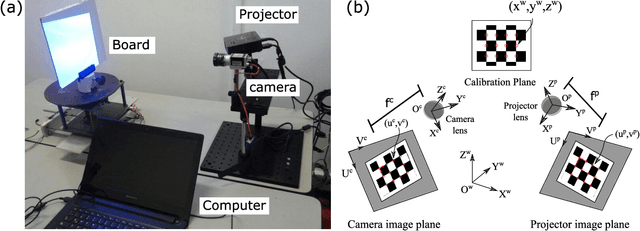
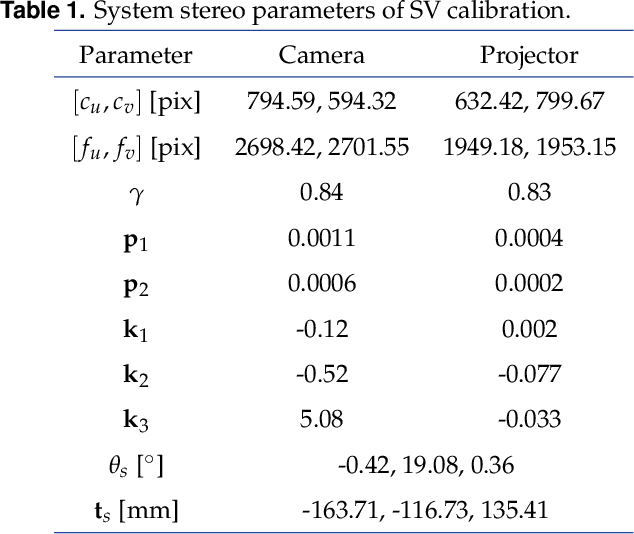
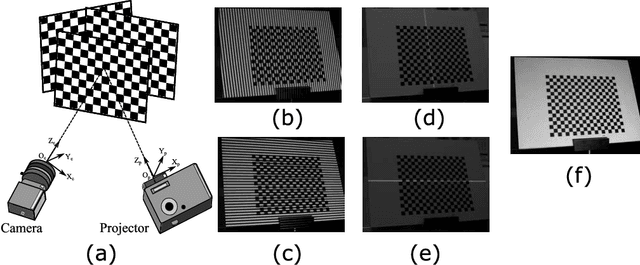
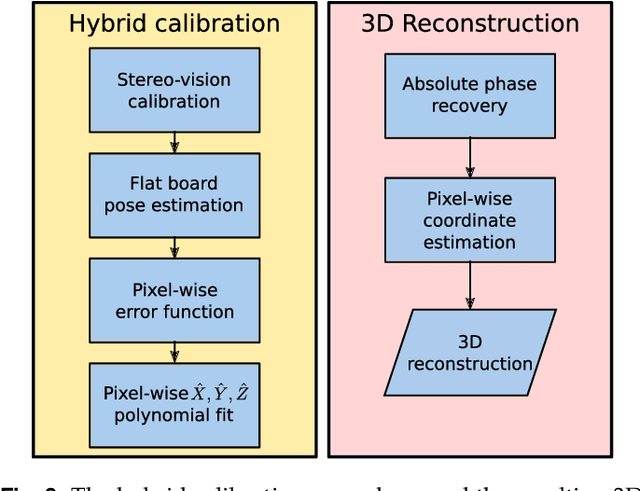
The key to accurate 3D shape measurement in Fringe Projection Profilometry (FPP) is the proper calibration of the measurement system. Current calibration techniques rely on phase-coordinate mapping (PCM) or back-projection stereo-vision (SV) methods. PCM methods are cumbersome to implement as they require precise positioning of the calibration target relative to the FPP system but produce highly accurate measurements within the calibration volume. SV methods generally do not achieve the same accuracy level. However, the calibration is more flexible in that the calibration target can be arbitrarily positioned. In this work, we propose a hybrid calibration method that leverages the SV calibration approach using a PCM method to achieve higher accuracy. The method has the flexibility of SV methods, is robust to lens distortions, and has a simple relation between the recovered phase and the metric coordinates. Experimental results show that the proposed Hybrid method outperforms the SV method in terms of accuracy and reconstruction time due to its low computational complexity.