 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Pickup and Delivery via Distributed Resource Allocation
Apr 06, 2021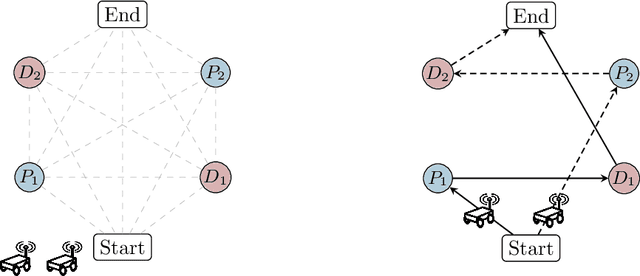
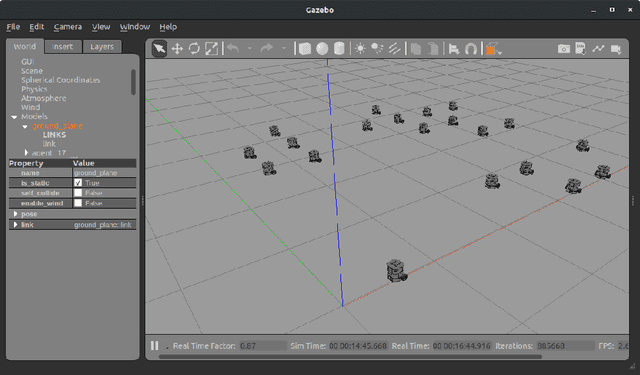

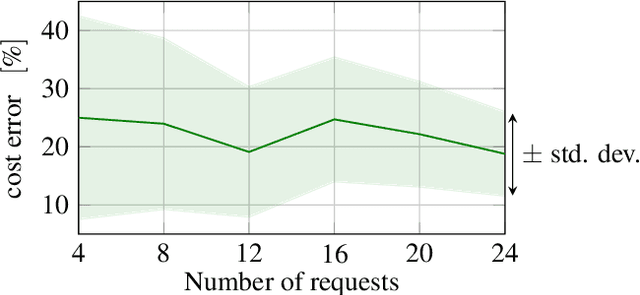
In this paper, we consider a large-scale instance of the classical Pickup-and-Delivery Vehicle Routing Problem (PDVRP) that must be solved by a network of mobile cooperating robots. Robots must self-coordinate and self-allocate a set of pickup/delivery tasks while minimizing a given cost figure. This results in a large, challenging Mixed-Integer Linear Problem that must be cooperatively solved without a central coordinator. We propose a distributed algorithm based on a primal decomposition approach that provides a feasible solution to the problem in finite time. An interesting feature of the proposed scheme is that each robot computes only its portion of solution, thereby preserving privacy of sensible information. The algorithm also exhibits attractive scalability properties that guarantee solvability of the problem even in large networks. To the best of our knowledge, this is the first attempt to provide a scalable distributed solution to the problem. The algorithm is first tested through Gazebo simulations on a ROS 2 platform, highlighting the effectiveness of the proposed solution. Finally, experiments on a real testbed with a team of ground and aerial robots are provided.
ChoiRbot: A ROS 2 Toolbox for Cooperative Robotics
Oct 26, 2020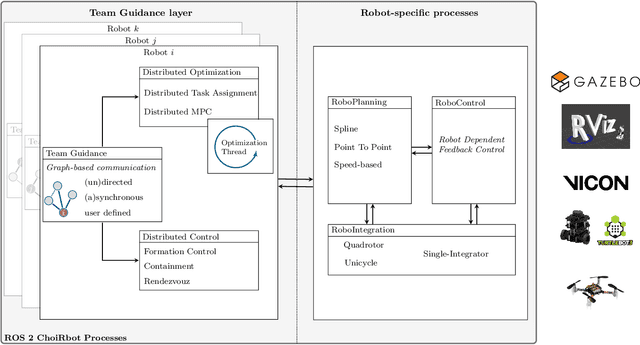

In this paper, we introduce ChoiRbot, a toolbox for distributed cooperative robotics based on the novel Robot Operating System (ROS) 2. ChoiRbot provides a fully-functional toolset to execute complex distributed multi-robot tasks, either in simulation or experimentally, with a particular focus on networks of heterogeneous robots without a central coordinator. Thanks to its modular structure, ChoiRbot allows for a highly straight implementation of optimization-based distributed control schemes, such as distributed optimal control, model predictive control, task assignment, in which local computation and communication with neighboring robots are alternated. To this end, the toolbox provides functionalities for the solution of distributed optimization problems. The package can be also used to implement distributed feedback laws that do not need optimization features but do require the exchange of information among robots. The potential of the toolbox is illustrated with simulations and experiments on distributed robotics scenarios with mobile ground robots. The ChoiRbot toolbox is available at https://github.com/OPT4SMART/choirbot.