 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderwater Object Classification and Detection: first results and open challenges
Jan 04, 2022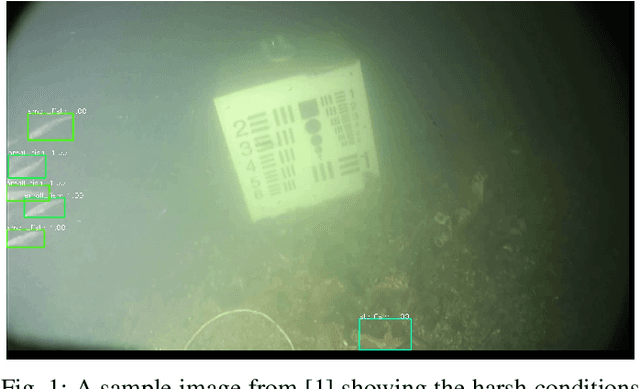

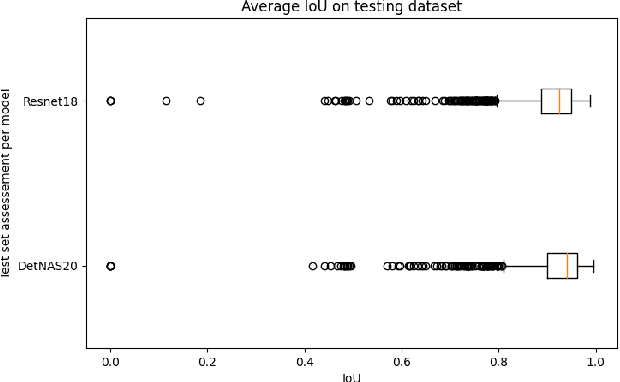
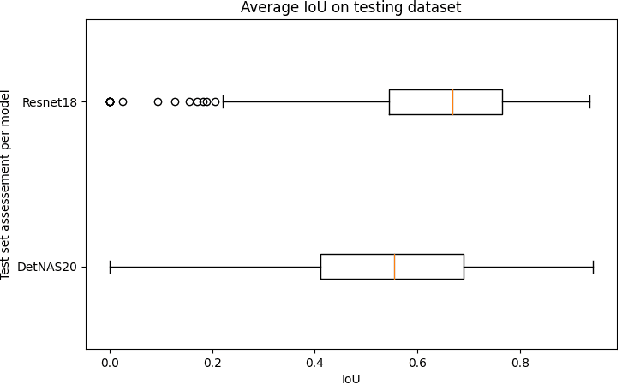
This work reviews the problem of object detection in underwater environments. We analyse and quantify the shortcomings of conventional state-of-the-art (SOTA) algorithms in the computer vision community when applied to this challenging environment, as well as providing insights and general guidelines for future research efforts. First, we assessed if pretraining with the conventional ImageNet is beneficial when the object detector needs to be applied to environments that may be characterised by a different feature distribution. We then investigate whether two-stage detectors yields to better performance with respect to single-stage detectors, in terms of accuracy, intersection of union (IoU), floating operation per second (FLOPS), and inference time. Finally, we assessed the generalisation capability of each model to a lower quality dataset to simulate performance on a real scenario, in which harsher conditions ought to be expected. Our experimental results provide evidence that underwater object detection requires searching for "ad-hoc" architectures than merely training SOTA architectures on new data, and that pretraining is not beneficial.