 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane-Merging Using Policy-based Reinforcement Learning and Post-Optimization
Mar 06, 2020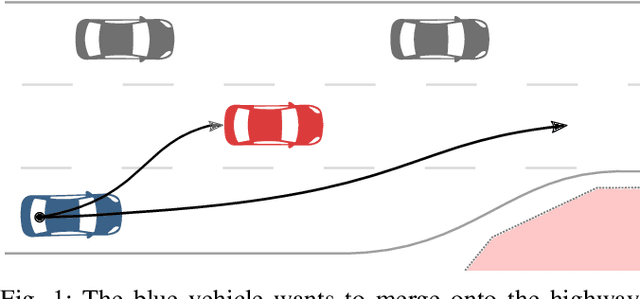
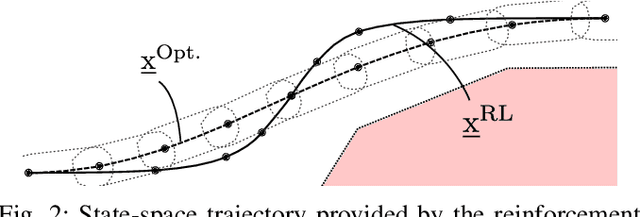
Many current behavior generation methods struggle to handle real-world traffic situations as they do not scale well with complexity. However, behaviors can be learned off-line using data-driven approaches. Especially, reinforcement learning is promising as it implicitly learns how to behave utilizing collected experiences. In this work, we combine policy-based reinforcement learning with local optimization to foster and synthesize the best of the two methodologies. The policy-based reinforcement learning algorithm provides an initial solution and guiding reference for the post-optimization. Therefore, the optimizer only has to compute a single homotopy class, e.g.\ drive behind or in front of the other vehicle. By storing the state-history during reinforcement learning, it can be used for constraint checking and the optimizer can account for interactions. The post-optimization additionally acts as a safety-layer and the novel method, thus, can be applied in safety-critical applications. We evaluate the proposed method using lane-change scenarios with a varying number of vehicles.