 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot adaptable task planning for autonomous construction robots: a comparative study of lightweight single and multi-AI agent systems
Jan 20, 2026Robots are expected to play a major role in the future construction industry but face challenges due to high costs and difficulty adapting to dynamic tasks. This study explores the potential of foundation models to enhance the adaptability and generalizability of task planning in construction robots. Four models are proposed and implemented using lightweight, open-source large language models (LLMs) and vision language models (VLMs). These models include one single agent and three multi-agent teams that collaborate to create robot action plans. The models are evaluated across three construction roles: Painter, Safety Inspector, and Floor Tiling. Results show that the four-agent team outperforms the state-of-the-art GPT-4o in most metrics while being ten times more cost-effective. Additionally, teams with three and four agents demonstrate the improved generalizability. By discussing how agent behaviors influence outputs, this study enhances the understanding of AI teams and supports future research in diverse unstructured environments beyond construction.
Impact of Robot Facial-Audio Expressions on Human Robot Trust Dynamics and Trust Repair
Dec 16, 2025


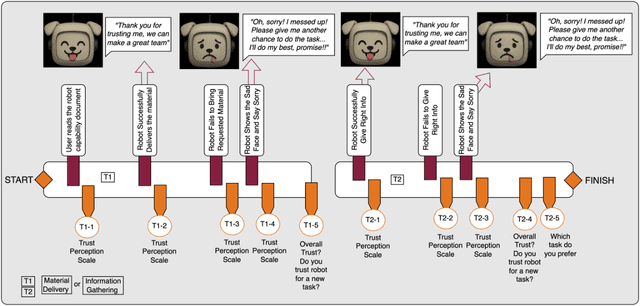
Despite recent advances in robotics and human-robot collaboration in the AEC industry, trust has mostly been treated as a static factor, with little guidance on how it changes across events during collaboration. This paper investigates how a robot's task performance and its expressive responses after outcomes shape the dynamics of human trust over time. To this end, we designed a controlled within-subjects study with two construction-inspired tasks, Material Delivery (physical assistance) and Information Gathering (perceptual assistance), and measured trust repeatedly (four times per task) using the 14-item Trust Perception Scale for HRI plus a redelegation choice. The robot produced two multimodal expressions, a "glad" display with a brief confirmation after success, and a "sad" display with an apology and a request for a second chance after failure. The study was conducted in a lab environment with 30 participants and a quadruped platform, and we evaluated trust dynamics and repair across both tasks. Results show that robot success reliably increases trust, failure causes sharp drops, and apology-based expressions partially restores trust (44% recovery in Material Delivery; 38% in Information Gathering). Item-level analysis indicates that recovered trust was driven mostly by interaction and communication factors, with competence recovering partially and autonomy aspects changing least. Additionally, age group and prior attitudes moderated trust dynamics with younger participants showed larger but shorter-lived changes, mid-20s participants exhibited the most durable repair, and older participants showed most conservative dynamics. This work provides a foundation for future efforts that adapt repair strategies to task demands and user profiles to support safe, productive adoption of robots on construction sites.
Autonomous Construction-Site Safety Inspection Using Mobile Robots: A Multilayer VLM-LLM Pipeline
Dec 16, 2025
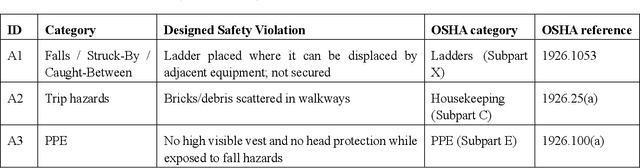


Construction safety inspection remains mostly manual, and automated approaches still rely on task-specific datasets that are hard to maintain in fast-changing construction environments due to frequent retraining. Meanwhile, field inspection with robots still depends on human teleoperation and manual reporting, which are labor-intensive. This paper aims to connect what a robot sees during autonomous navigation to the safety rules that are common in construction sites, automatically generating a safety inspection report. To this end, we proposed a multi-layer framework with two main modules: robotics and AI. On the robotics side, SLAM and autonomous navigation provide repeatable coverage and targeted revisits via waypoints. On AI side, a Vision Language Model (VLM)-based layer produces scene descriptions; a retrieval component powered grounds those descriptions in OSHA and site policies; Another VLM-based layer assesses the safety situation based on rules; and finally Large Language Model (LLM) layer generates safety reports based on previous outputs. The framework is validated with a proof-of-concept implementation and evaluated in a lab environment that simulates common hazards across three scenarios. Results show high recall with competitive precision compared to state-of-the-art closed-source models. This paper contributes a transparent, generalizable pipeline that moves beyond black-box models by exposing intermediate artifacts from each layer and keeping the human in the loop. This work provides a foundation for future extensions to additional tasks and settings within and beyond construction context.
Autonomous Building Cyber-Physical Systems Using Decentralized Autonomous Organizations, Digital Twins, and Large Language Model
Oct 25, 2024



Current autonomous building research primarily focuses on energy efficiency and automation. While traditional artificial intelligence has advanced autonomous building research, it often relies on predefined rules and struggles to adapt to complex, evolving building operations. Moreover, the centralized organizational structures of facilities management hinder transparency in decision-making, limiting true building autonomy. Research on decentralized governance and adaptive building infrastructure, which could overcome these challenges, remains relatively unexplored. This paper addresses these limitations by introducing a novel Decentralized Autonomous Building Cyber-Physical System framework that integrates Decentralized Autonomous Organizations, Large Language Models, and digital twins to create a smart, self-managed, operational, and financially autonomous building infrastructure. This study develops a full-stack decentralized application to facilitate decentralized governance of building infrastructure. An LLM-based artificial intelligence assistant is developed to provide intuitive human-building interaction for blockchain and building operation management-related tasks and enable autonomous building operation. Six real-world scenarios were tested to evaluate the autonomous building system's workability, including building revenue and expense management, AI-assisted facility control, and autonomous adjustment of building systems. Results indicate that the prototype successfully executes these operations, confirming the framework's suitability for developing building infrastructure with decentralized governance and autonomous operation.
Foundation Models for Autonomous Robots in Unstructured Environments
Jul 19, 2024



Automating activities through robots in unstructured environments, such as construction sites, has been a long-standing desire. However, the high degree of unpredictable events in these settings has resulted in far less adoption compared to more structured settings, such as manufacturing, where robots can be hard-coded or trained on narrowly defined datasets. Recently, pretrained foundation models, such as Large Language Models (LLMs), have demonstrated superior generalization capabilities by providing zero-shot solutions for problems do not present in the training data, proposing them as a potential solution for introducing robots to unstructured environments. To this end, this study investigates potential opportunities and challenges of pretrained foundation models from a multi-dimensional perspective. The study systematically reviews application of foundation models in two field of robotic and unstructured environment and then synthesized them with deliberative acting theory. Findings showed that linguistic capabilities of LLMs have been utilized more than other features for improving perception in human-robot interactions. On the other hand, findings showed that the use of LLMs demonstrated more applications in project management and safety in construction, and natural hazard detection in disaster management. Synthesizing these findings, we located the current state-of-the-art in this field on a five-level scale of automation, placing them at conditional automation. This assessment was then used to envision future scenarios, challenges, and solutions toward autonomous safe unstructured environments. Our study can be seen as a benchmark to track our progress toward that future.