 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Capture Benchmark of Real Industrial Tasks and Traditional Crafts for Human Movement Analysis
Apr 03, 2023

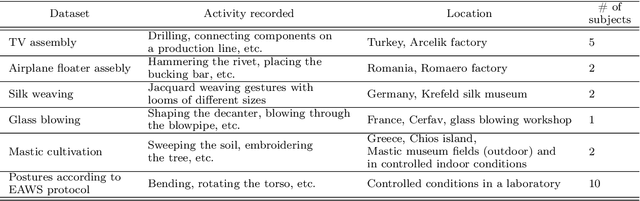

Human movement analysis is a key area of research in robotics, biomechanics, and data science. It encompasses tracking, posture estimation, and movement synthesis. While numerous methodologies have evolved over time, a systematic and quantitative evaluation of these approaches using verifiable ground truth data of three-dimensional human movement is still required to define the current state of the art. This paper presents seven datasets recorded using inertial-based motion capture. The datasets contain professional gestures carried out by industrial operators and skilled craftsmen performed in real conditions in-situ. The datasets were created with the intention of being used for research in human motion modeling, analysis, and generation. The protocols for data collection are described in detail, and a preliminary analysis of the collected data is provided as a benchmark. The Gesture Operational Model, a hybrid stochastic-biomechanical approach based on kinematic descriptors, is utilized to model the dynamics of the experts' movements and create mathematical representations of their motion trajectories for analysis and quantifying their body dexterity. The models allowed accurate the generation of human professional poses and an intuitive description of how body joints cooperate and change over time through the performance of the task.
Computational ergonomics for task delegation in Human-Robot Collaboration: spatiotemporal adaptation of the robot to the human through contactless gesture recognition
Mar 22, 2022



The high prevalence of work-related musculoskeletal disorders (WMSDs) could be addressed by optimizing Human-Robot Collaboration (HRC) frameworks for manufacturing applications. In this context, this paper proposes two hypotheses for ergonomically effective task delegation and HRC. The first hypothesis states that it is possible to quantify ergonomically professional tasks using motion data from a reduced set of sensors. Then, the most dangerous tasks can be delegated to a collaborative robot. The second hypothesis is that by including gesture recognition and spatial adaptation, the ergonomics of an HRC scenario can be improved by avoiding needless motions that could expose operators to ergonomic risks and by lowering the physical effort required of operators. An HRC scenario for a television manufacturing process is optimized to test both hypotheses. For the ergonomic evaluation, motion primitives with known ergonomic risks were modeled for their detection in professional tasks and to estimate a risk score based on the European Assembly Worksheet (EAWS). A Deep Learning gesture recognition module trained with egocentric television assembly data was used to complement the collaboration between the human operator and the robot. Additionally, a skeleton-tracking algorithm provided the robot with information about the operator's pose, allowing it to spatially adapt its motion to the operator's anthropometrics. Three experiments were conducted to determine the effect of gesture recognition and spatial adaptation on the operator's range of motion. The rate of spatial adaptation was used as a key performance indicator (KPI), and a new KPI for measuring the reduction in the operator's motion is presented in this paper.