 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssessing the Capability of YOLO- and Transformer-based Object Detectors for Real-time Weed Detection
Jan 30, 2025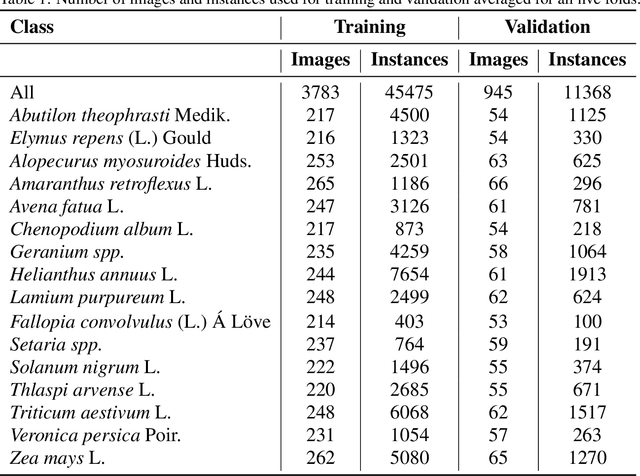
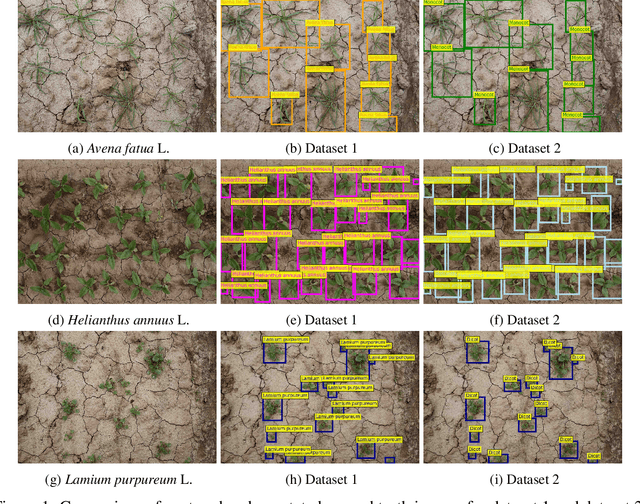
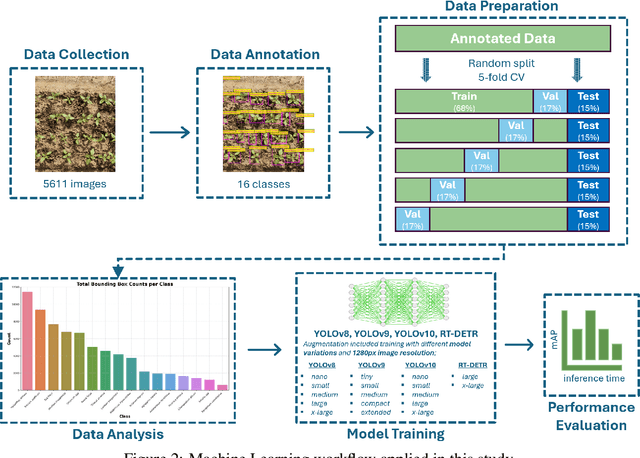
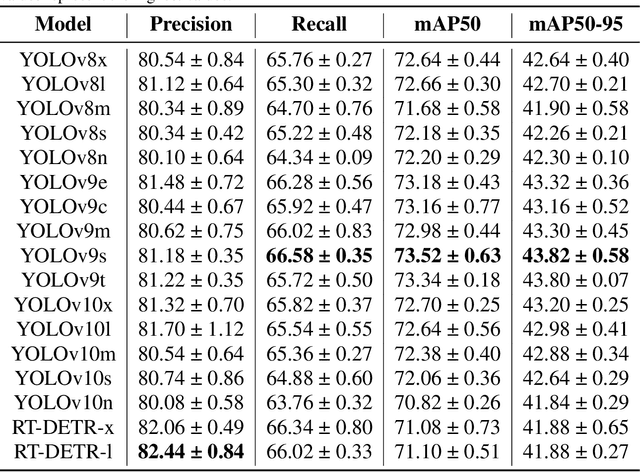
Spot spraying represents an efficient and sustainable method for reducing the amount of pesticides, particularly herbicides, used in agricultural fields. To achieve this, it is of utmost importance to reliably differentiate between crops and weeds, and even between individual weed species in situ and under real-time conditions. To assess suitability for real-time application, different object detection models that are currently state-of-the-art are compared. All available models of YOLOv8, YOLOv9, YOLOv10, and RT-DETR are trained and evaluated with images from a real field situation. The images are separated into two distinct datasets: In the initial data set, each species of plants is trained individually; in the subsequent dataset, a distinction is made between monocotyledonous weeds, dicotyledonous weeds, and three chosen crops. The results demonstrate that while all models perform equally well in the metrics evaluated, the YOLOv9 models, particularly the YOLOv9s and YOLOv9e, stand out in terms of their strong recall scores (66.58 % and 72.36 %), as well as mAP50 (73.52 % and 79.86 %), and mAP50-95 (43.82 % and 47.00 %) in dataset 2. However, the RT-DETR models, especially RT-DETR-l, excel in precision with reaching 82.44 \% on dataset 1 and 81.46 % in dataset 2, making them particularly suitable for scenarios where minimizing false positives is critical. In particular, the smallest variants of the YOLO models (YOLOv8n, YOLOv9t, and YOLOv10n) achieve substantially faster inference times down to 7.58 ms for dataset 2 on the NVIDIA GeForce RTX 4090 GPU for analyzing one frame, while maintaining competitive accuracy, highlighting their potential for deployment in resource-constrained embedded computing devices as typically used in productive setups.
Comparative Analysis of YOLOv9, YOLOv10 and RT-DETR for Real-Time Weed Detection
Dec 18, 2024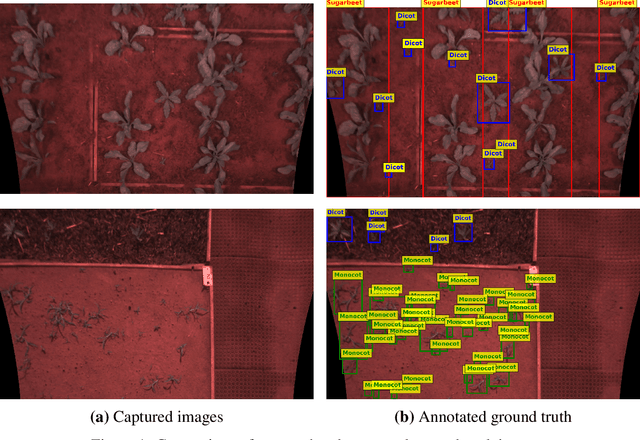
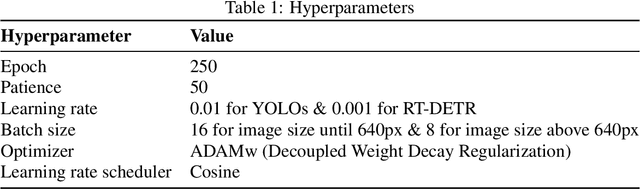
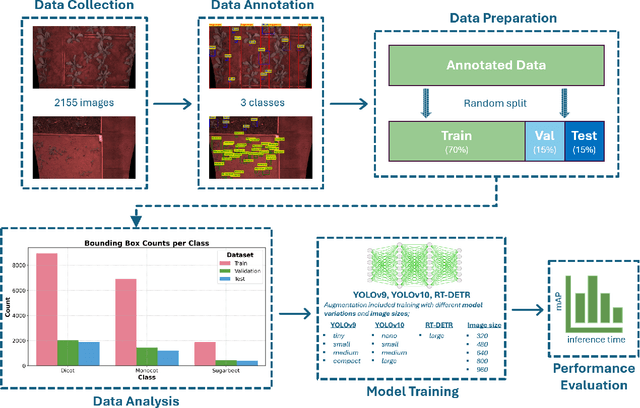
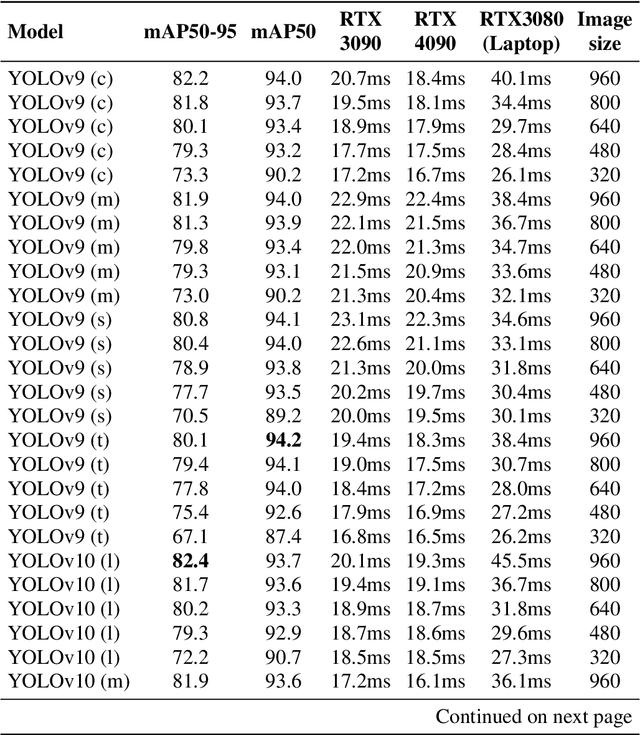
This paper presents a comprehensive evaluation of state-of-the-art object detection models, including YOLOv9, YOLOv10, and RT-DETR, for the task of weed detection in smart-spraying applications focusing on three classes: Sugarbeet, Monocot, and Dicot. The performance of these models is compared based on mean Average Precision (mAP) scores and inference times on different GPU devices. We consider various model variations, such as nano, small, medium, large alongside different image resolutions (320px, 480px, 640px, 800px, 960px). The results highlight the trade-offs between inference time and detection accuracy, providing valuable insights for selecting the most suitable model for real-time weed detection. This study aims to guide the development of efficient and effective smart spraying systems, enhancing agricultural productivity through precise weed management.