 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Inference-Driven World Modeling for Adaptive UAV Swarm Trajectory Design
Jan 19, 2026This paper proposes an Active Inference-based framework for autonomous trajectory design in UAV swarms. The method integrates probabilistic reasoning and self-learning to enable distributed mission allocation, route ordering, and motion planning. Expert trajectories generated using a Genetic Algorithm with Repulsion Forces (GA-RF) are employed to train a hierarchical World Model capturing swarm behavior across mission, route, and motion levels. During online operation, UAVs infer actions by minimizing divergence between current beliefs and model-predicted states, enabling adaptive responses to dynamic environments. Simulation results show faster convergence, higher stability, and safer navigation than Q-Learning, demonstrating the scalability and cognitive grounding of the proposed framework for intelligent UAV swarm control.
Interactive Bayesian Generative Models for Abnormality Detection in Vehicular Networks
Mar 06, 2024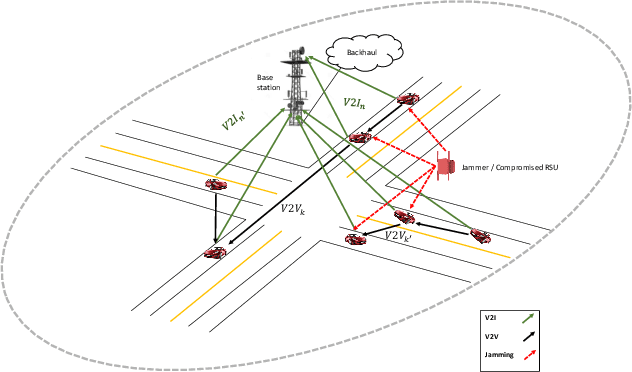
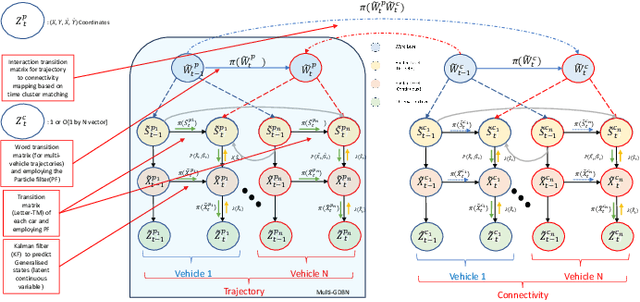
The following paper proposes a novel Vehicle-to-Everything (V2X) network abnormality detection scheme based on Bayesian generative models for enhanced network self-awareness functionality at the Base station (BS). In the learning phase, multi-modal data signals contrived by the vehicles' integrated and sensing module are imbued into data-driven Generalized Dynamic Bayesian network (GDBN) models. Following that, during the testing phase, an Interactive Modified Markov Jump Particle filter (IM-MJPF) is utilized to forecast forthcoming network states and vehicle trajectories by leveraging the assimilated semantics embedded in the coupled multi-GDBNs. This approach involves learning statistically correlated association between evolving trajectories and network communication links. Security and surveillance of Internet of Vehicles (IOVs) links are performed online with high detection probabilities by matching predicted with observed network connectivity maps (graphs).
Intelligent Resource Allocation for UAV-Based Cognitive NOMA Networks: An Active Inference Approach
Oct 17, 2023


Future wireless networks will need to improve adaptive resource allocation and decision-making to handle the increasing number of intelligent devices. Unmanned aerial vehicles (UAVs) are being explored for their potential in real-time decision-making. Moreover, cognitive non-orthogonal multiple access (Cognitive-NOMA) is envisioned as a remedy to address spectrum scarcity and enable massive connectivity. This paper investigates the design of joint subchannel and power allocation in an uplink UAV-based cognitive NOMA network. We aim to maximize the cumulative sum rate by jointly optimizing the subchannel and power allocation based on the UAV's mobility at each time step. This is often formulated as an optimization problem with random variables. However, conventional optimization algorithms normally introduce significant complexity, and machine learning methods often rely on large but partially representative datasets to build solution models, assuming stationary testing data. Consequently, inference strategies for non stationary events are often overlooked. In this study, we introduce a novel active inference-based learning approach, rooted in cognitive neuroscience, to solve this complex problem. The framework involves creating a training dataset using random or iterative methods to find suboptimal resource allocations. This dataset trains a mobile UAV offline, enabling it to learn a generative model of discrete subchannels and continuous power allocation. The UAV then uses this model for online inference. The method incrementally derives new generative models from training data by identifying dynamic equilibrium conditions between required actions and variables, represented within a unique dynamic Bayesian network. The proposed approach is validated through numerical simulations, showing efficient performance compared to suboptimal baseline schemes.
Active Inference for Sum Rate Maximization in UAV-Assisted Cognitive NOMA Networks
Sep 20, 2023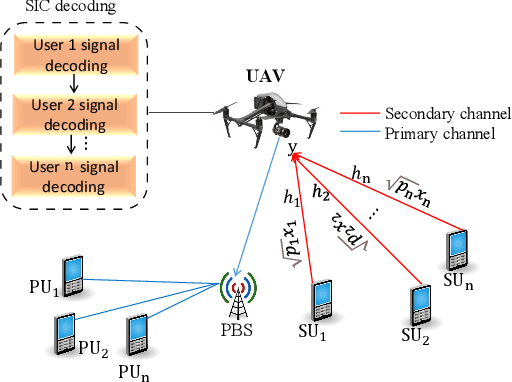
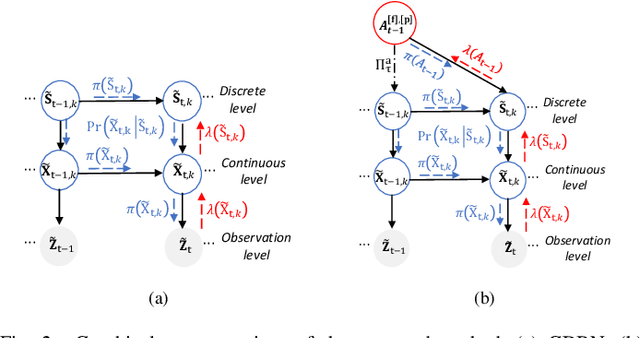


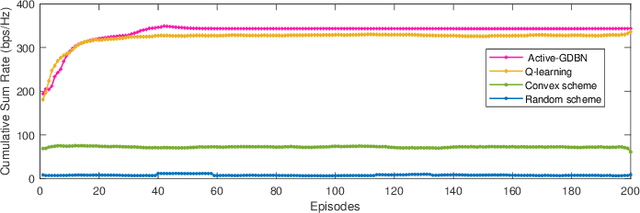
Given the surge in wireless data traffic driven by the emerging Internet of Things (IoT), unmanned aerial vehicles (UAVs), cognitive radio (CR), and non-orthogonal multiple access (NOMA) have been recognized as promising techniques to overcome massive connectivity issues. As a result, there is an increasing need to intelligently improve the channel capacity of future wireless networks. Motivated by active inference from cognitive neuroscience, this paper investigates joint subchannel and power allocation for an uplink UAV-assisted cognitive NOMA network. Maximizing the sum rate is often a highly challenging optimization problem due to dynamic network conditions and power constraints. To address this challenge, we propose an active inference-based algorithm. We transform the sum rate maximization problem into abnormality minimization by utilizing a generalized state-space model to characterize the time-changing network environment. The problem is then solved using an Active Generalized Dynamic Bayesian Network (Active-GDBN). The proposed framework consists of an offline perception stage, in which a UAV employs a hierarchical GDBN structure to learn an optimal generative model of discrete subchannels and continuous power allocation. In the online active inference stage, the UAV dynamically selects discrete subchannels and continuous power to maximize the sum rate of secondary users. By leveraging the errors in each episode, the UAV can adapt its resource allocation policies and belief updating to improve its performance over time. Simulation results demonstrate the effectiveness of our proposed algorithm in terms of cumulative sum rate compared to benchmark schemes.
Integrated Sensing and Communication for Joint GPS Spoofing and Jamming Detection in Vehicular V2X Networks
Feb 01, 2023Vehicle-to-everything (V2X) communication is expected to be a prominent component of the sixth generation (6G) to accomplish intelligent transportation systems (ITS). Autonomous vehicles relying only on onboard sensors cannot bypass the limitations of safety and reliability. Thus, integrated sensing and communication is proposed as an effective way to achieve high situational- and self-awareness levels, enabling V2X to perceive the physical world and adjust its behaviour to emergencies. Secure navigation through the Global Positioning System (GPS) is essential in ITS for safe operation. Nevertheless, due to the lack of encryption and authentication mechanisms of civil GPS receivers, spoofers can easily replicate satellite signals by launching GPS spoofing attacks to deceive the vehicle and manipulate navigation data. In addition, due to its shared nature, V2X links are prone to jamming attacks which might endanger vehicular safety. This paper proposes a method to jointly detect GPS spoofing and jamming attacks in a V2X network. Simulation results demonstrate that the proposed method can detect spoofers and jammers with high detection probabilities.
Learning Self-Awareness Models for Physical Layer Security in Cognitive and AI-enabled Radios
Nov 23, 2022Cognitive Radio (CR) is a paradigm shift in wireless communications to resolve the spectrum scarcity issue with the ability to self-organize, self-plan and self-regulate. On the other hand, wireless devices that can learn from their environment can also be taught things by malicious elements of their environment, and hence, malicious attacks are a great concern in the CR, especially for physical layer security. This thesis introduces a data-driven Self-Awareness (SA) module in CR that can support the system to establish secure networks against various attacks from malicious users. Such users can manipulate the radio spectrum to make the CR learn wrong behaviours and take mistaken actions. The SA module consists of several functionalities that allow the radio to learn a hierarchical representation of the environment and grow its long-term memory incrementally. Therefore, this novel SA module is a way forward towards realizing the original vision of CR (i.e. Mitola's Radio) and AI-enabled radios. Experimental results show that introducing the novel SA functionalities provides the high accuracy of characterizing, detecting, classifying and predicting the jammer's activities and outperforms conventional detection methods such as Energy detectors and advanced classification methods such as Long Short-Term Memory (LSTM), Convolutional Neural Network (CNN) and Stacked Autoencoder (SAE). It also verifies that the proposed approach achieves a higher degree of explainability than deep learning techniques and verifies the capability to learn an efficient strategy to avoid future attacks with higher convergence speed compared to conventional Frequency Hopping and Q-learning.
A Novel Resource Allocation for Anti-jamming in Cognitive-UAVs: an Active Inference Approach
Aug 10, 2022
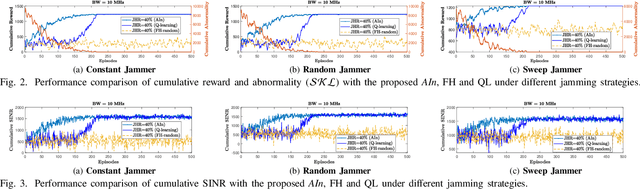
This work proposes a novel resource allocation strategy for anti-jamming in Cognitive Radio using Active Inference ($\textit{AIn}$), and a cognitive-UAV is employed as a case study. An Active Generalized Dynamic Bayesian Network (Active-GDBN) is proposed to represent the external environment that jointly encodes the physical signal dynamics and the dynamic interaction between UAV and jammer in the spectrum. We cast the action and planning as a Bayesian inference problem that can be solved by avoiding surprising states (minimizing abnormality) during online learning. Simulation results verify the effectiveness of the proposed $\textit{AIn}$ approach in minimizing abnormalities (maximizing rewards) and has a high convergence speed by comparing it with the conventional Frequency Hopping and Q-learning.