 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking Road Users using Constraint Programming
Mar 10, 2020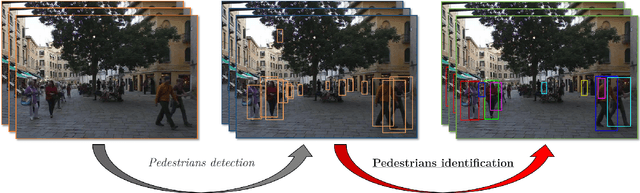
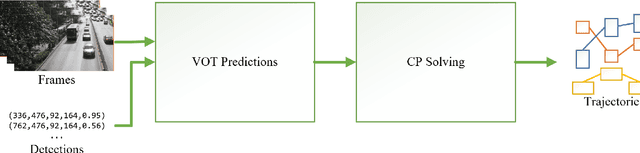
In this paper, we aim at improving the tracking of road users in urban scenes. We present a constraint programming (CP) approach for the data association phase found in the tracking-by-detection paradigm of the multiple object tracking (MOT) problem. Such an approach can solve the data association problem more efficiently than graph-based methods and can handle better the combinatorial explosion occurring when multiple frames are analyzed. Because our focus is on the data association problem, our MOT method only uses simple image features, which are the center position and color of detections for each frame. Constraints are defined on these two features and on the general MOT problem. For example, we enforce color appearance preservation over trajectories and constrain the extent of motion between frames. Filtering layers are used in order to eliminate detection candidates before using CP and to remove dummy trajectories produced by the CP solver. Our proposed method was tested on a motorized vehicles tracking dataset and produces results that outperform the top methods of the UA-DETRAC benchmark.