 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Stable and Collision-Free Policies through Lyapunov Function Learning
Nov 16, 2022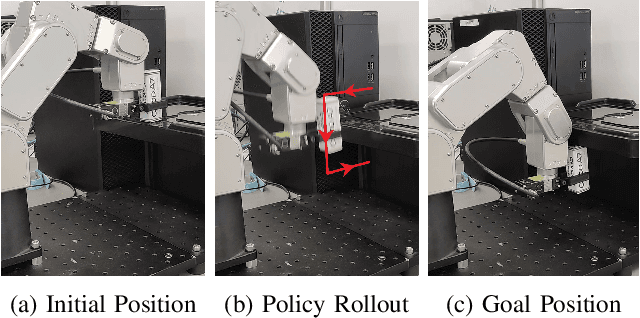
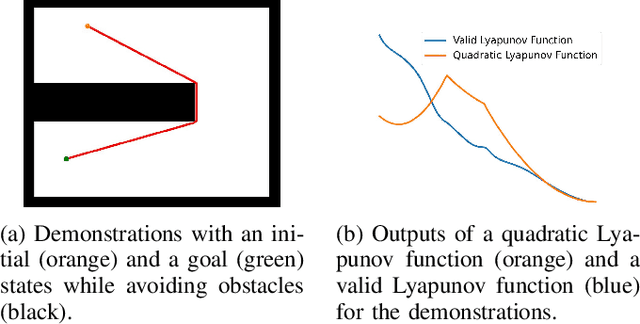
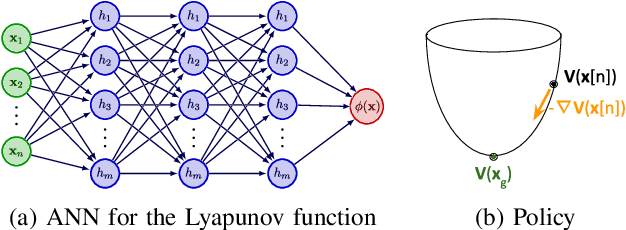
The need for rapid and reliable robot deployment is on the rise. Imitation Learning (IL) has become popular for producing motion planning policies from a set of demonstrations. However, many methods in IL are not guaranteed to produce stable policies. The generated policy may not converge to the robot target, reducing reliability, and may collide with its environment, reducing the safety of the system. Stable Estimator of Dynamic Systems (SEDS) produces stable policies by constraining the Lyapunov stability criteria during learning, but the Lyapunov candidate function had to be manually selected. In this work, we propose a novel method for learning a Lyapunov function and a policy using a single neural network model. The method can be equipped with an obstacle avoidance module for convex object pairs to guarantee no collisions. We demonstrated our method is capable of finding policies in several simulation environments and transfer to a real-world scenario.
High Precision Real Time Collision Detection
Jul 23, 2020
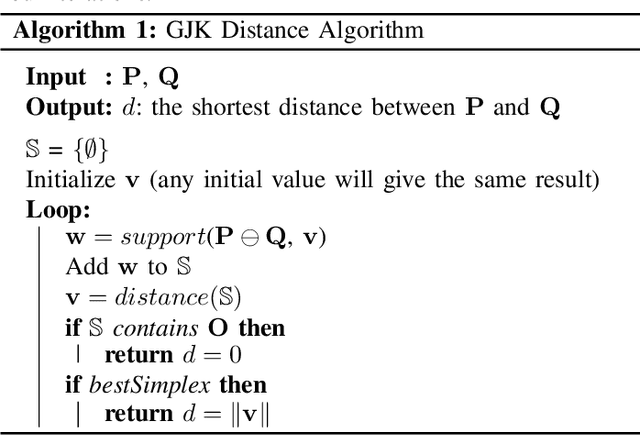
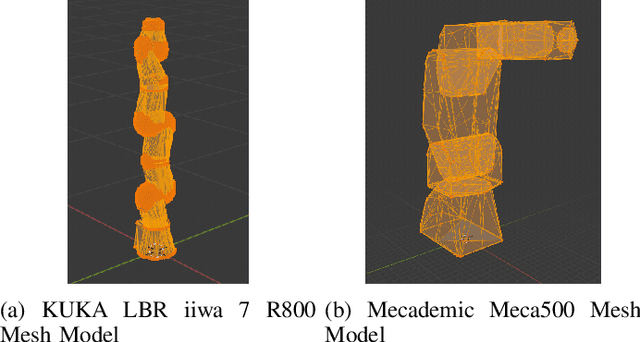
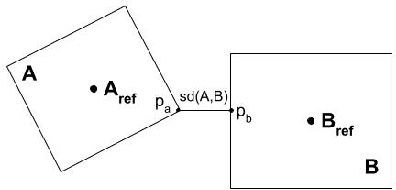
Collision detection and collision avoidance are essential components in these systems for safe human-robot interactions. Robotics systems that can work "out-of-the-box" without excessive amount of installation and calibration from the experts is highly ideal. For this, we propose a generic, high precision, collision detect system that only requires the unified robot description format (URDF) and is capable of running in real time. We extended the Gilbert-Johnson-Keerthi (GJK) algorithm by utilizing a geometrical approach to determine the distance between each rigid body in the environment and check for collisions. The proposed system's performance is shown by checking the self-collision of the KUKA LBR iiwa 7 R800 and the Mecademic Meca500. The performance is compared to the Flexible Collision Library (FCL).