 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoss-Complexity Landscape and Model Structure Functions
Jul 17, 2025We develop a framework for dualizing the Kolmogorov structure function $h_x(\alpha)$, which then allows using computable complexity proxies. We establish a mathematical analogy between information-theoretic constructs and statistical mechanics, introducing a suitable partition function and free energy functional. We explicitly prove the Legendre-Fenchel duality between the structure function and free energy, showing detailed balance of the Metropolis kernel, and interpret acceptance probabilities as information-theoretic scattering amplitudes. A susceptibility-like variance of model complexity is shown to peak precisely at loss-complexity trade-offs interpreted as phase transitions. Practical experiments with linear and tree-based regression models verify these theoretical predictions, explicitly demonstrating the interplay between the model complexity, generalization, and overfitting threshold.
Fast Geometric Embedding for Node Influence Maximization
Jun 09, 2025Computing classical centrality measures such as betweenness and closeness is computationally expensive on large-scale graphs. In this work, we introduce an efficient force layout algorithm that embeds a graph into a low-dimensional space, where the radial distance from the origin serves as a proxy for various centrality measures. We evaluate our method on multiple graph families and demonstrate strong correlations with degree, PageRank, and paths-based centralities. As an application, it turns out that the proposed embedding allows to find high-influence nodes in a network, and provides a fast and scalable alternative to the standard greedy algorithm.
DiRe-JAX: A JAX based Dimensionality Reduction Algorithm for Large-scale Data
Mar 06, 2025
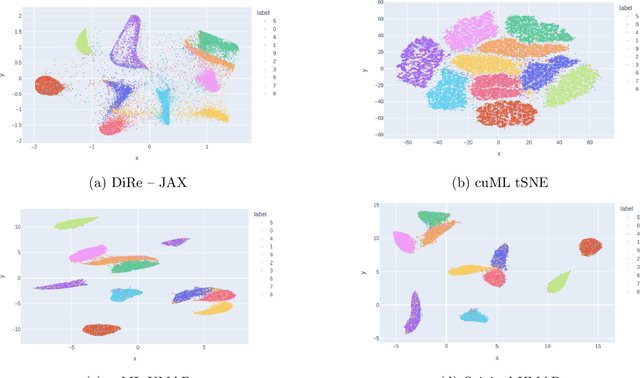
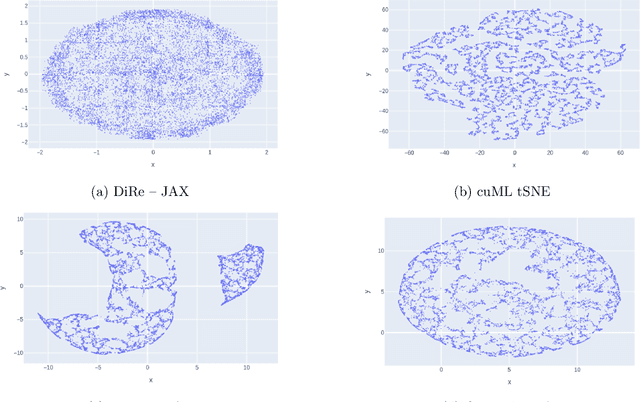
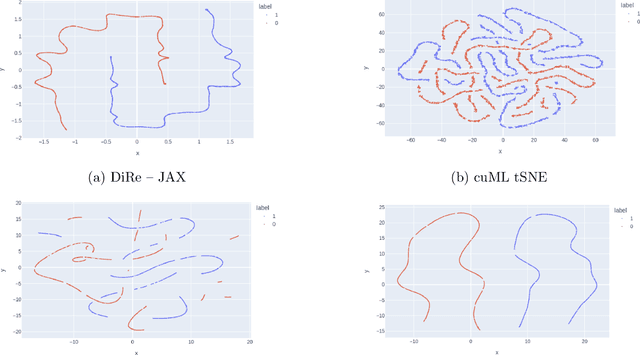
DiRe - JAX is a new dimensionality reduction toolkit designed to address some of the challenges faced by traditional methods like UMAP and tSNE such as loss of global structure and computational efficiency. Built on the JAX framework, DiRe leverages modern hardware acceleration to provide an efficient, scalable, and interpretable solution for visualizing complex data structures, and for quantitative analysis of lower-dimensional embeddings. The toolkit shows considerable promise in preserving both local and global structures within the data as compared to state-of-the-art UMAP and tSNE implementations. This makes it suitable for a wide range of applications in machine learning, bio-informatics, and data science.
Machine Learning of the Prime Distribution
Mar 19, 2024In the present work we use maximum entropy methods to derive several theorems in probabilistic number theory, including a version of the Hardy-Ramanujan Theorem. We also provide a theoretical argument explaining the experimental observations of Y.-H. He about the learnability of primes, and posit that the Erd\H{o}s-Kac law would very unlikely be discovered by current machine learning techniques. Numerical experiments that we perform corroborate our theoretical findings.
A ripple in time: a discontinuity in American history
Dec 02, 2023In this note we use the State of the Union Address dataset from Kaggle to make some surprising (and some not so surprising) observations pertaining to the general timeline of American history, and the character and nature of the addresses themselves. Our main approach is using vector embeddings, such as BERT (DistilBERT) and GPT-2. While it is widely believed that BERT (and its variations) is most suitable for NLP classification tasks, we find out that GPT-2 in conjunction with nonlinear dimension reduction methods such as UMAP provide better separation and stronger clustering. This makes GPT-2 + UMAP an interesting alternative. In our case, no model fine-tuning is required, and the pre-trained out-of-the-box GPT-2 model is enough. We also used a fine-tuned DistilBERT model for classification (detecting which president delivered which address), with very good results (accuracy 93% - 95% depending on the run). All computations can be replicated by using the accompanying code on GitHub.
Robust affine feature matching via quadratic assignment on Grassmannians
Mar 07, 2023



GraNNI (Grassmannians for Nearest Neighbours Identification) a new algorithm to solve the problem of affine registration is proposed. The algorithm is based on the Grassmannian of $k$--dimensional planes in $\mathbb{R}^n$ and minimizing the Frobenius norm between the two elements of the Grassmannian. The Quadratic Assignment Problem (QAP) is used to find the matching. The results of the experiments show that the algorithm is more robust to noise and point discrepancy in point clouds than previous approaches.
An approach to robust ICP initialization
Dec 10, 2022



In this note, we propose an approach for initializing the Iterative Closest Point (ICP) algorithm that allows us to apply ICP to unlabelled point clouds that are related by rigid transformations. We also give bounds on the robustness of our approach to noise. Numerical experiments confirm our theoretical findings.