 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Fluid-Based Thermal Management Systems Design: Leveraging Graph Neural Networks for Graph Regression and Efficient Enumeration Reduction
Nov 24, 2023In this research, we developed a graph-based framework to represent various aspects of optimal thermal management system design, with the aim of rapidly and efficiently identifying optimal design candidates. Initially, the graph-based framework is utilized to generate diverse thermal management system architectures. The dynamics of these system architectures are modeled under various loading conditions, and an open-loop optimal controller is employed to determine each system's optimal performance. These modeled cases constitute the dataset, with the corresponding optimal performance values serving as the labels for the data. In the subsequent step, a Graph Neural Network (GNN) model is trained on 30% of the labeled data to predict the systems' performance, effectively addressing a regression problem. Utilizing this trained model, we estimate the performance values for the remaining 70% of the data, which serves as the test set. In the third step, the predicted performance values are employed to rank the test data, facilitating prioritized evaluation of the design scenarios. Specifically, a small subset of the test data with the highest estimated ranks undergoes evaluation via the open-loop optimal control solver. This targeted approach concentrates on evaluating higher-ranked designs identified by the GNN, replacing the exhaustive search (enumeration-based) of all design cases. The results demonstrate a significant average reduction of over 92% in the number of system dynamic modeling and optimal control analyses required to identify optimal design scenarios.
Contact Area Detector using Cross View Projection Consistency for COVID-19 Projects
Aug 18, 2020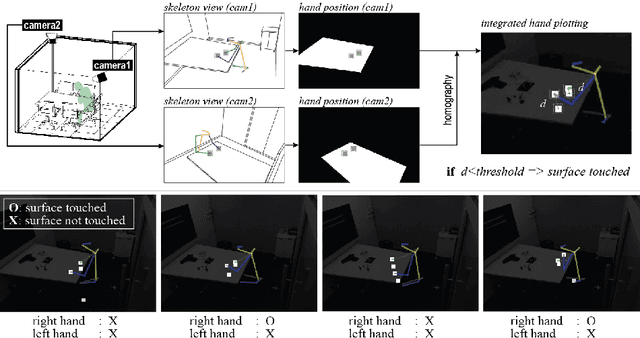
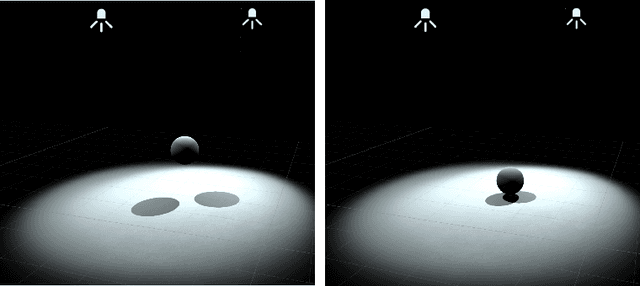
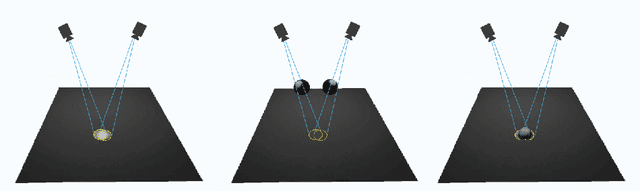
The ability to determine what parts of objects and surfaces people touch as they go about their daily lives would be useful in understanding how the COVID-19 virus spreads. To determine whether a person has touched an object or surface using visual data, images, or videos, is a hard problem. Computer vision 3D reconstruction approaches project objects and the human body from the 2D image domain to 3D and perform 3D space intersection directly. However, this solution would not meet the accuracy requirement in applications due to projection error. Another standard approach is to train a neural network to infer touch actions from the collected visual data. This strategy would require significant amounts of training data to generalize over scale and viewpoint variations. A different approach to this problem is to identify whether a person has touched a defined object. In this work, we show that the solution to this problem can be straightforward. Specifically, we show that the contact between an object and a static surface can be identified by projecting the object onto the static surface through two different viewpoints and analyzing their 2D intersection. The object contacts the surface when the projected points are close to each other; we call this cross view projection consistency. Instead of doing 3D scene reconstruction or transfer learning from deep networks, a mapping from the surface in the two camera views to the surface space is the only requirement. For planar space, this mapping is the Homography transformation. This simple method can be easily adapted to real-life applications. In this paper, we apply our method to do office occupancy detection for studying the COVID-19 transmission pattern from an office desk in a meeting room using the contact information.
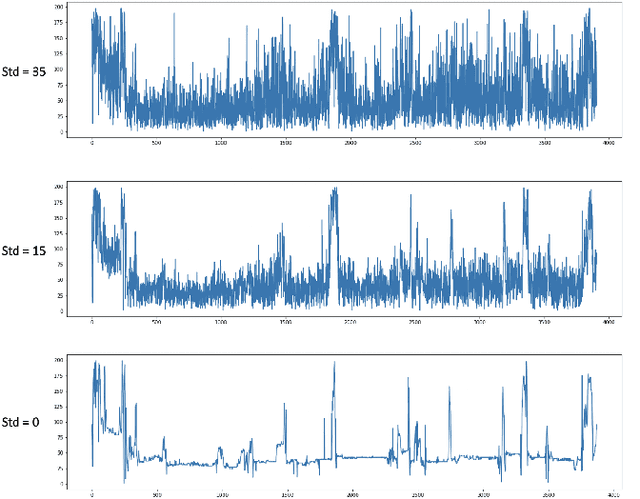
A streaming feature-based compression method for data from instrumented infrastructure
Apr 12, 2019
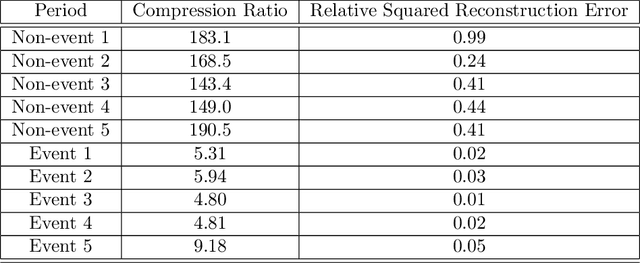

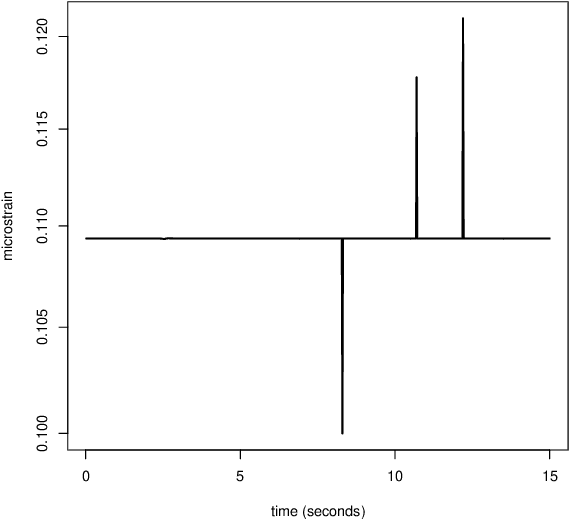
An increasing amount of civil engineering applications are utilising data acquired from infrastructure instrumented with sensing devices. This data has an important role in monitoring the response of these structures to excitation, and evaluating structural health. In this paper we seek to monitor pedestrian-events (such as a person walking) on a footbridge using strain and acceleration data. The rate of this data acquisition and the number of sensing devices make the storage and analysis of this data a computational challenge. We introduce a streaming method to compress the sensor data, whilst preserving key patterns and features (unique to different sensor types) corresponding to pedestrian-events. Numerical demonstrations of the methodology on data obtained from strain sensors and accelerometers on the pedestrian footbridge are provided to show the trade-off between compression and accuracy during and in-between periods of pedestrian-events.