 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing Deep Learning of Point Clouds for Inverse Control of 3D Shape Morphing
Jan 26, 2024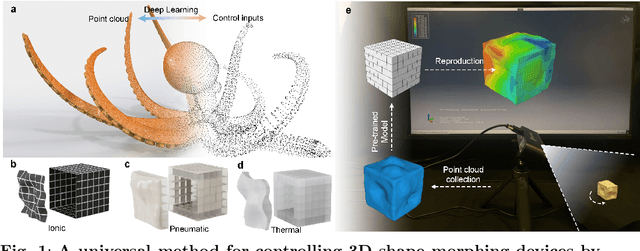
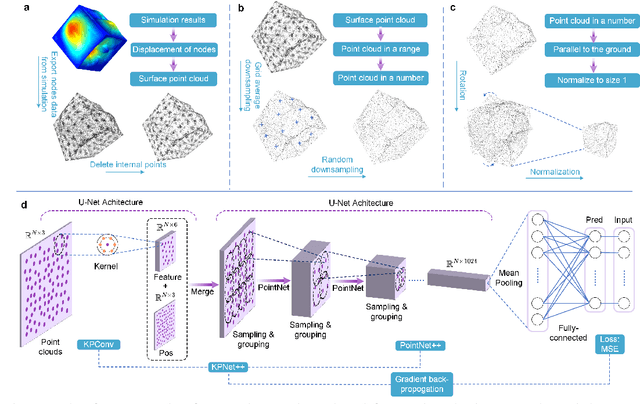
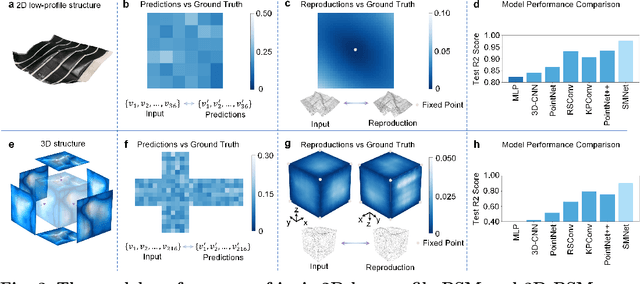
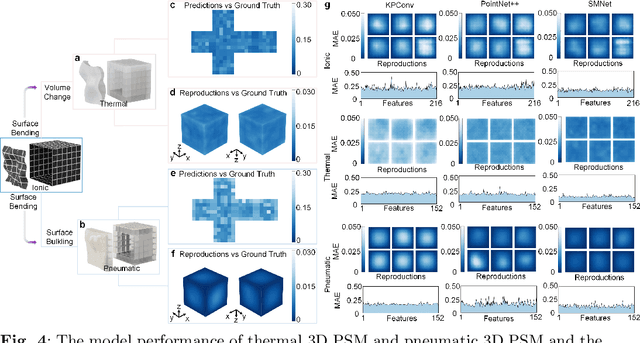
Shape-morphing devices, a crucial branch in soft robotics, hold significant application value in areas like human-machine interfaces, biomimetic robotics, and tools for interacting with biological systems. To achieve three-dimensional (3D) programmable shape morphing (PSM), the deployment of array-based actuators is essential. However, a critical knowledge gap impeding the development of 3D PSM is the challenge of controlling the complex systems formed by these soft actuator arrays. This study introduces a novel approach, for the first time, representing the configuration of shape morphing devices using point cloud data and employing deep learning to map these configurations to control inputs. We propose Shape Morphing Net (SMNet), a method that realizes the regression from point cloud data to high-dimensional continuous vectors. Applied to previous 2D PSM actuator arrays, SMNet significantly enhances control precision from 82.23% to 97.68%. Further, we extend its application to 3D PSM devices with three different actuator mechanisms, demonstrating the universal applicability of SMNet to the control of 3D shape morphing technologies. In our demonstrations, we confirm the efficacy of inverse control, where 3D PSM devices successfully replicate target shapes. These shapes are obtained either through 3D scanning of physical objects or via 3D modeling software. The results show that within the deformable range of 3D PSM devices, accurate reproduction of the desired shapes is achievable. The findings of this research represent a substantial advancement in soft robotics, particularly for applications demanding intricate 3D shape transformations, and establish a foundational framework for future developments in the field.
Passively Addressed Morphing Surface (PARMS) Based on Machine Learning
Jan 30, 2023Reconfigurable morphing surfaces provide new opportunities for advanced human-machine interfaces and bio-inspired robotics. Morphing into arbitrary surfaces on demand requires a device with a sufficiently large number of actuators and an inverse control strategy that can calculate the actuator stimulation necessary to achieve a target surface. The programmability of a morphing surface can be improved by increasing the number of independent actuators, but this increases the complexity of the control system. Thus, developing compact and efficient control interfaces and control algorithms is a crucial knowledge gap for the adoption of morphing surfaces in broad applications. In this work, we describe a passively addressed robotic morphing surface (PARMS) composed of matrix-arranged ionic actuators. To reduce the complexity of the physical control interface, we introduce passive matrix addressing. Matrix addressing allows the control of independent actuators using only 2N control inputs, which is significantly lower than control inputs required for traditional direct addressing. Our control algorithm is based on machine learning using finite element simulations as the training data. This machine learning approach allows both forward and inverse control with high precision in real time. Inverse control demonstrations show that the PARMS can dynamically morph into arbitrary pre-defined surfaces on demand. These innovations in actuator matrix control may enable future implementation of PARMS in wearables, haptics, and augmented reality/virtual reality (AR/VR).