 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafePath: Conformal Prediction for Safe LLM-Based Autonomous Navigation
May 15, 2025

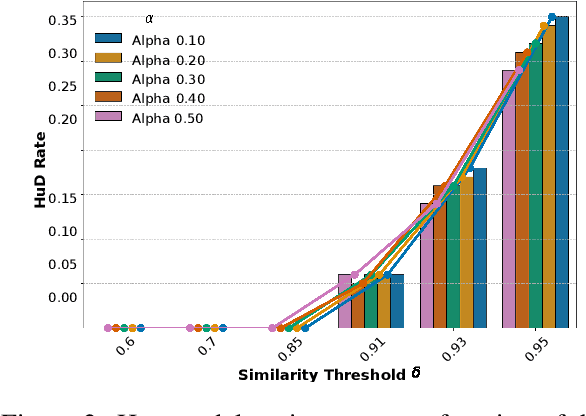

Large Language Models (LLMs) show growing promise in autonomous driving by reasoning over complex traffic scenarios to generate path plans. However, their tendencies toward overconfidence, and hallucinations raise critical safety concerns. We introduce SafePath, a modular framework that augments LLM-based path planning with formal safety guarantees using conformal prediction. SafePath operates in three stages. In the first stage, we use an LLM that generates a set of diverse candidate paths, exploring possible trajectories based on agent behaviors and environmental cues. In the second stage, SafePath filters out high-risk trajectories while guaranteeing that at least one safe option is included with a user-defined probability, through a multiple-choice question-answering formulation that integrates conformal prediction. In the final stage, our approach selects the path with the lowest expected collision risk when uncertainty is low or delegates control to a human when uncertainty is high. We theoretically prove that SafePath guarantees a safe trajectory with a user-defined probability, and we show how its human delegation rate can be tuned to balance autonomy and safety. Extensive experiments on nuScenes and Highway-env show that SafePath reduces planning uncertainty by 77\% and collision rates by up to 70\%, demonstrating effectiveness in making LLM-driven path planning more safer.
Whenever, Wherever: Towards Orchestrating Crowd Simulations with Spatio-Temporal Spawn Dynamics
Mar 20, 2025



Realistic crowd simulations are essential for immersive virtual environments, relying on both individual behaviors (microscopic dynamics) and overall crowd patterns (macroscopic characteristics). While recent data-driven methods like deep reinforcement learning improve microscopic realism, they often overlook critical macroscopic features such as crowd density and flow, which are governed by spatio-temporal spawn dynamics, namely, when and where agents enter a scene. Traditional methods, like random spawn rates, stochastic processes, or fixed schedules, are not guaranteed to capture the underlying complexity or lack diversity and realism. To address this issue, we propose a novel approach called nTPP-GMM that models spatio-temporal spawn dynamics using Neural Temporal Point Processes (nTPPs) that are coupled with a spawn-conditional Gaussian Mixture Model (GMM) for agent spawn and goal positions. We evaluate our approach by orchestrating crowd simulations of three diverse real-world datasets with nTPP-GMM. Our experiments demonstrate the orchestration with nTPP-GMM leads to realistic simulations that reflect real-world crowd scenarios and allow crowd analysis.
LiOn-XA: Unsupervised Domain Adaptation via LiDAR-Only Cross-Modal Adversarial Training
Oct 21, 2024



In this paper, we propose LiOn-XA, an unsupervised domain adaptation (UDA) approach that combines LiDAR-Only Cross-Modal (X) learning with Adversarial training for 3D LiDAR point cloud semantic segmentation to bridge the domain gap arising from environmental and sensor setup changes. Unlike existing works that exploit multiple data modalities like point clouds and RGB image data, we address UDA in scenarios where RGB images might not be available and show that two distinct LiDAR data representations can learn from each other for UDA. More specifically, we leverage 3D voxelized point clouds to preserve important geometric structure in combination with 2D projection-based range images that provide information such as object orientations or surfaces. To further align the feature space between both domains, we apply adversarial training using both features and predictions of both 2D and 3D neural networks. Our experiments on 3 real-to-real adaptation scenarios demonstrate the effectiveness of our approach, achieving new state-of-the-art performance when compared to previous uni- and multi-model UDA methods. Our source code is publicly available at https://github.com/JensLe97/lion-xa.
Unsupervised Driving Event Discovery Based on Vehicle CAN-data
Jan 12, 2023



The data collected from a vehicle's Controller Area Network (CAN) can quickly exceed human analysis or annotation capabilities when considering fleets of vehicles, which stresses the importance of unsupervised machine learning methods. This work presents a simultaneous clustering and segmentation approach for vehicle CAN-data that identifies common driving events in an unsupervised manner. The approach builds on self-supervised learning (SSL) for multivariate time series to distinguish different driving events in the learned latent space. We evaluate our approach with a dataset of real Tesla Model 3 vehicle CAN-data and a two-hour driving session that we annotated with different driving events. With our approach, we evaluate the applicability of recent time series-related contrastive and generative SSL techniques to learn representations that distinguish driving events. Compared to state-of-the-art (SOTA) generative SSL methods for driving event discovery, we find that contrastive learning approaches reach similar performance.
Unsupervised 4D LiDAR Moving Object Segmentation in Stationary Settings with Multivariate Occupancy Time Series
Dec 30, 2022



In this work, we address the problem of unsupervised moving object segmentation (MOS) in 4D LiDAR data recorded from a stationary sensor, where no ground truth annotations are involved. Deep learning-based state-of-the-art methods for LiDAR MOS strongly depend on annotated ground truth data, which is expensive to obtain and scarce in existence. To close this gap in the stationary setting, we propose a novel 4D LiDAR representation based on multivariate time series that relaxes the problem of unsupervised MOS to a time series clustering problem. More specifically, we propose modeling the change in occupancy of a voxel by a multivariate occupancy time series (MOTS), which captures spatio-temporal occupancy changes on the voxel level and its surrounding neighborhood. To perform unsupervised MOS, we train a neural network in a self-supervised manner to encode MOTS into voxel-level feature representations, which can be partitioned by a clustering algorithm into moving or stationary. Experiments on stationary scenes from the Raw KITTI dataset show that our fully unsupervised approach achieves performance that is comparable to that of supervised state-of-the-art approaches.
On computable abstractions (a conceptual introduction)
Mar 29, 2015This paper introduces abstractions that are meaningful for computers and that can be built and used according to computers' own criteria, i.e., computable abstractions. It is analyzed how abstractions can be seen to serve as the building blocks for the creation of one own's understanding of things, which is essential in performing intellectual tasks. Thus, abstractional machines are defined, which following a mechanical process can, based on computable abstractions, build and use their own understanding of things. Abstractional machines are illustrated through an example that outlines their application to the task of natural language processing.