Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraduated Fidelity Lattices for Motion Planning under Uncertainty
May 31, 2019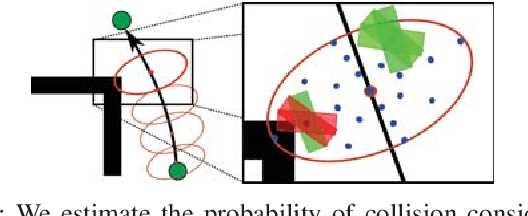
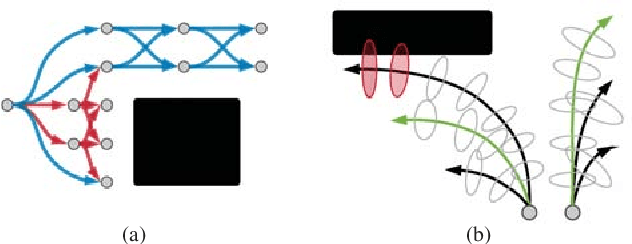

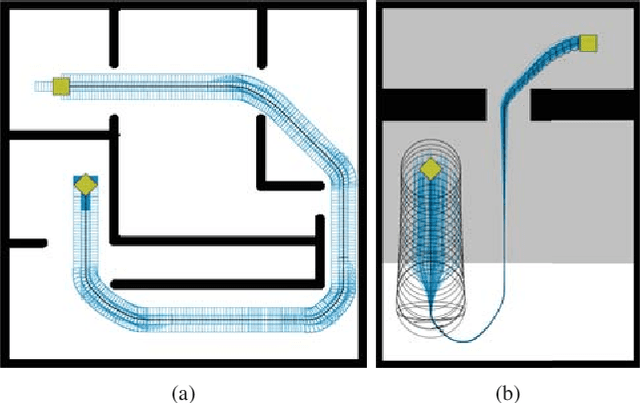
We present a novel approach for motion planning in mobile robotics under sensing and motion uncertainty based on state lattices with graduated fidelity. The probability of collision is reliably estimated considering the robot shape, and the fidelity adapts to the complexity of the environment, improving the planning efficiency while maintaining the performance. Safe and optimal paths are found with an informed search algorithm, for which a novel multi-resolution heuristic is presented. Results for different scenarios and robot shapes are given, showing the validity of the proposed methods.
* Text accepted for publication in the 2019 IEEE International
Conference on Robotics and Automation (ICRA)
Via