 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMACE: Multi-Agent Autonomous Collaborative Exploration of Unknown Environments
Aug 16, 2022
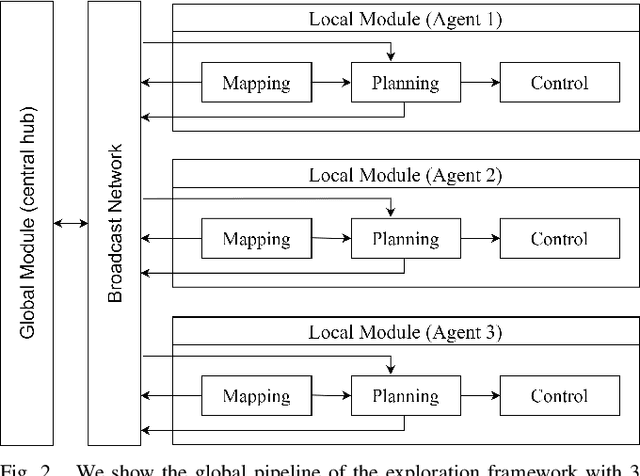
In this paper, we propose a new framework for multi-agent collaborative exploration of unknown environments. The proposed method combines state-of-the-art algorithms in mapping, safe corridor generation and multi-agent planning. It first takes a volume that we want to explore, then proceeds to give the multiple agents different goals in order to explore a voxel grid of that volume. The exploration ends when all voxels are discovered as free or occupied, or there is no path found for the remaining undiscovered voxels. The state-of-the-art planning algorithm uses time-aware Safe Corridors to guarantee intra-agent collision safety as well safety from static obstacles. The presented approach is tested in a state of the art simulator for up to 4 agents.
Multirotor Planning in Dynamic Environments using Temporal Safe Corridors
Aug 16, 2022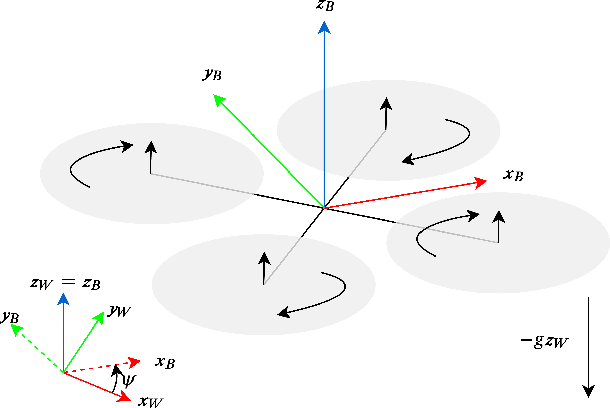
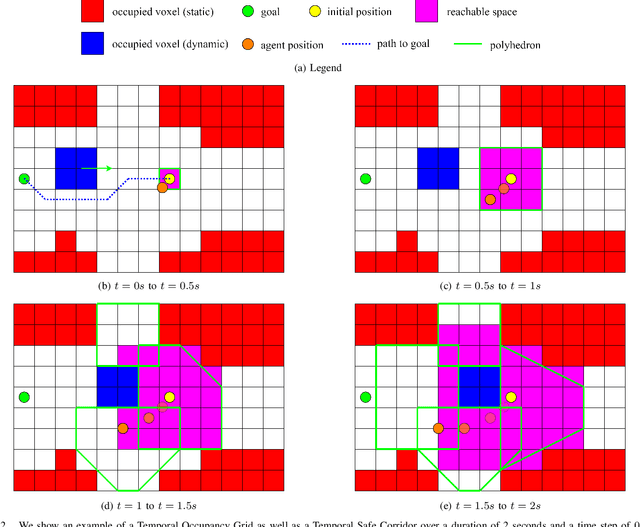
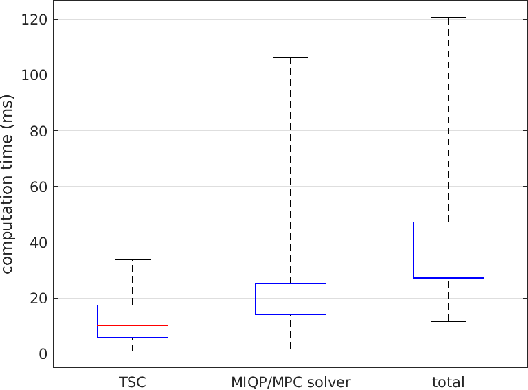
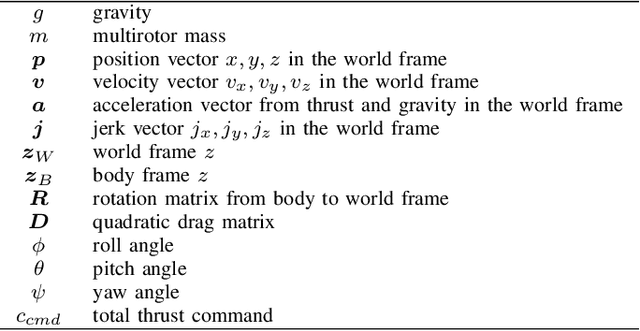
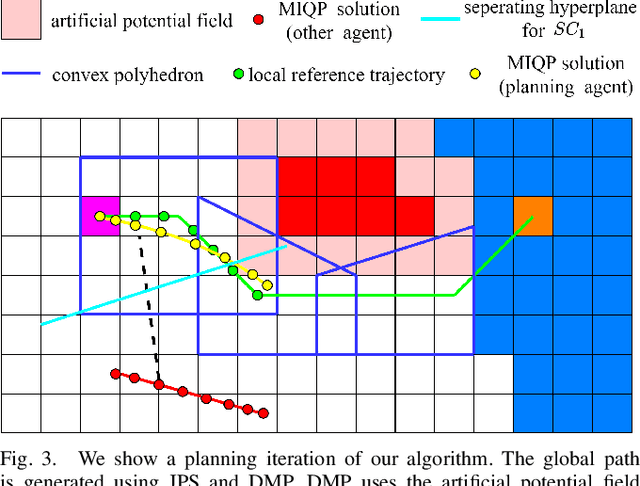
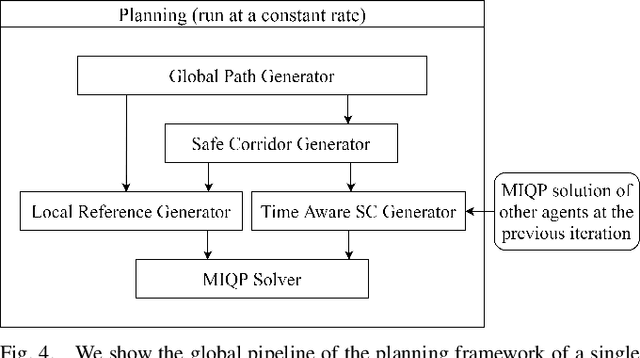
In this paper, we propose a new method for multirotor planning in dynamic environments. The environment is represented as a temporal occupancy grid which gives the current as well as the future/predicted state of all the obstacles. The method builds on previous works in Safe Corridor generation and multirotor planning to avoid moving and static obstacles. It first generates a global path to the goal that doesn't take into account the dynamic aspect of the environment. We then use temporal Safe Corridors to generate safe spaces that the robot can be in at discrete instants in the future. Finally we use the temporal Safe Corridors in an optimization formulation that accounts for the multirotor dynamics as well as all the obstacles to generate the trajectory that will be executed by the multirotor's controller. We show the performance of our method in simulations.
Shape-aware Safe Corridors Generation using Voxel Grids
Aug 16, 2022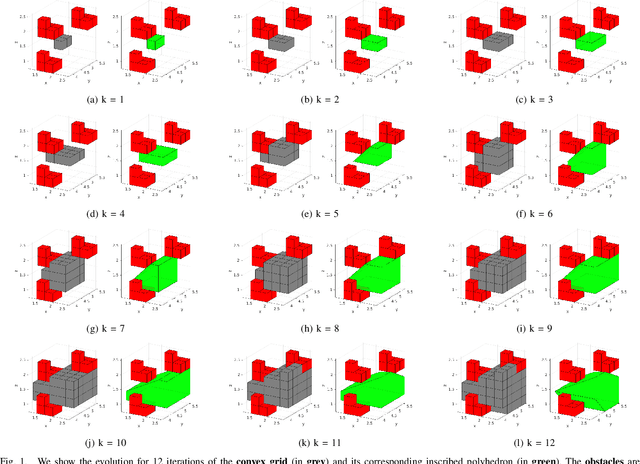
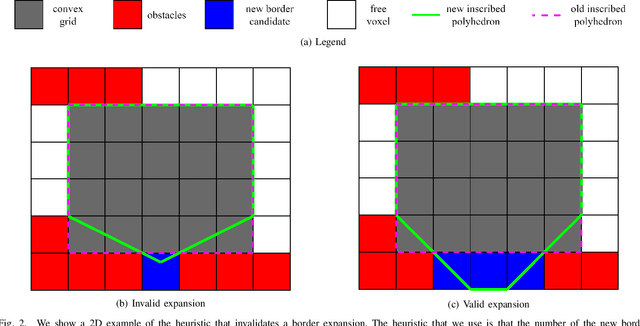
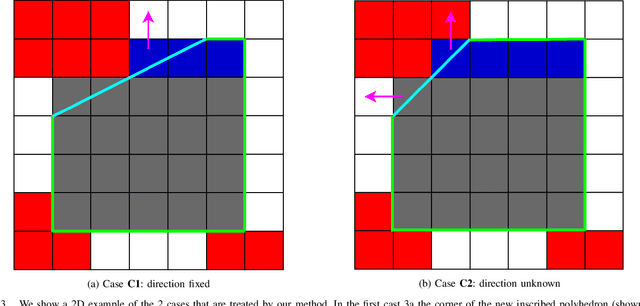
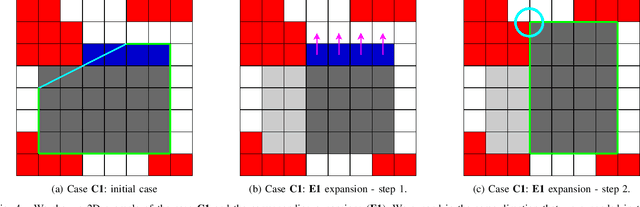
Safe Corridors (a series of overlapping convex shapes) have been used recently in multiple state-of-the-art motion planning methods. They allow to represent the free space in the environment in an efficient way for collision avoidance. In this paper, we propose a new framework for generating Safe Corridors. We assume that we have a voxel grid representation of the environment. The proposed framework improves on a previous state-of-the-art voxel grid based Safe Corridor generation method. It also creates a connectivity graph between polyhedra of a given Safe Corridor that allows to know which polyhedra intersect with each other. The connectivity graph can be used in planning methods to reduce computation time. The method is compared to other state-of-the-art methods in simulations in terms of computation time, volume covered, safety, number of polyhedron per Safe Corridor and number of constraints per polyhedron.
GPU Accelerated Voxel Grid Generation for Fast MAV Exploration
Jan 06, 2022



Voxel grids are a minimal and efficient environment representation that is used for robot motion planning in numerous tasks. Many state-of-the-art planning algorithms use voxel grids composed of free, occupied and unknown voxels. In this paper we propose a new GPU accelerated algorithm for partitioning the space into a voxel grid with occupied, free and unknown voxels. The proposed approach is low latency and suitable for high speed navigation.
Low Speed Automation, a French Initiative
Dec 19, 2012



Nowadays, vehicle safety is constantly increasing thanks to the improvement of vehicle passive and active safety. However, on a daily usage of the car, traffic jams remains a problem. With limited space for road infrastructure, automation of the driving task on specific situation seems to be a possible solution. The French project ABV, which stands for low speed automation, tries to demonstrate the feasibility of the concept and to prove the benefits. In this article, we describe the scientific background of the project and expected outputs.