 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMACE: Multi-Agent Autonomous Collaborative Exploration of Unknown Environments
Paper and Code
Aug 16, 2022
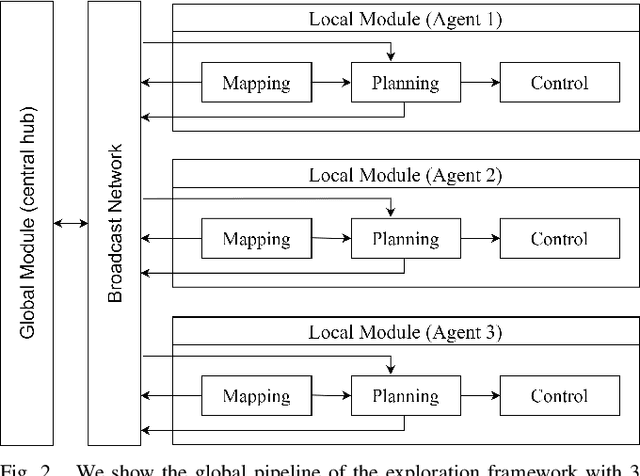
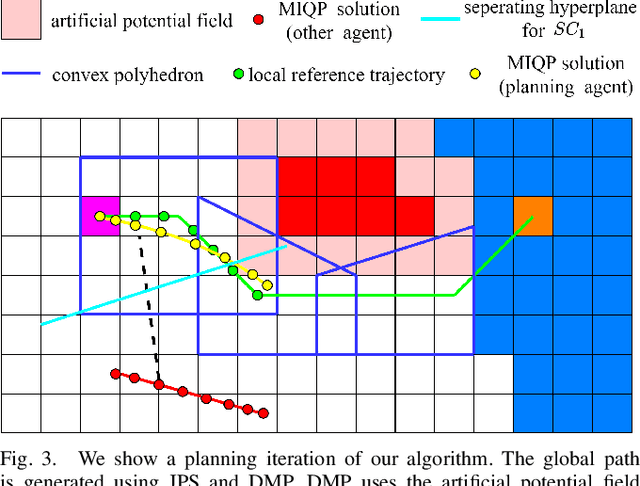
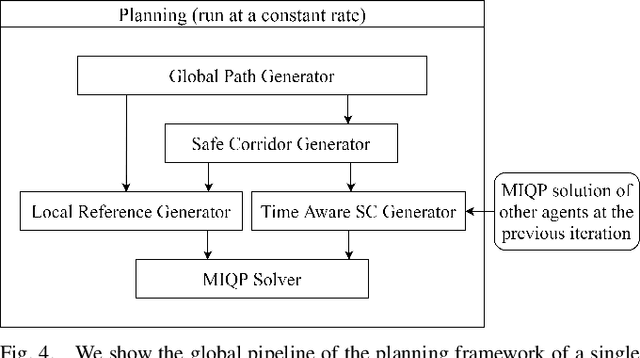
In this paper, we propose a new framework for multi-agent collaborative exploration of unknown environments. The proposed method combines state-of-the-art algorithms in mapping, safe corridor generation and multi-agent planning. It first takes a volume that we want to explore, then proceeds to give the multiple agents different goals in order to explore a voxel grid of that volume. The exploration ends when all voxels are discovered as free or occupied, or there is no path found for the remaining undiscovered voxels. The state-of-the-art planning algorithm uses time-aware Safe Corridors to guarantee intra-agent collision safety as well safety from static obstacles. The presented approach is tested in a state of the art simulator for up to 4 agents.