 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThreat Detection In Self-Driving Vehicles Using Computer Vision
Sep 06, 2022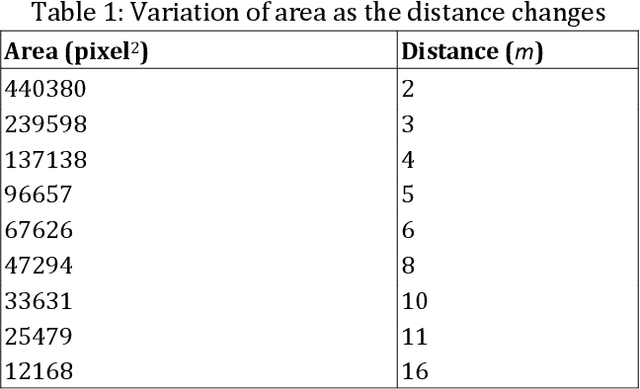
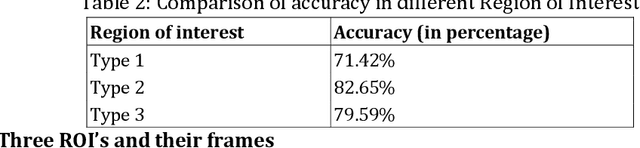
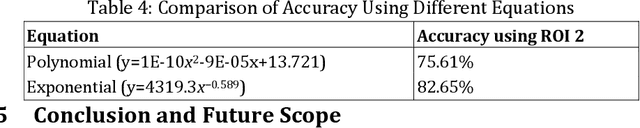
On-road obstacle detection is an important field of research that falls in the scope of intelligent transportation infrastructure systems. The use of vision-based approaches results in an accurate and cost-effective solution to such systems. In this research paper, we propose a threat detection mechanism for autonomous self-driving cars using dashcam videos to ensure the presence of any unwanted obstacle on the road that falls within its visual range. This information can assist the vehicle's program to en route safely. There are four major components, namely, YOLO to identify the objects, advanced lane detection algorithm, multi regression model to measure the distance of the object from the camera, the two-second rule for measuring the safety, and limiting speed. In addition, we have used the Car Crash Dataset(CCD) for calculating the accuracy of the model. The YOLO algorithm gives an accuracy of around 93%. The final accuracy of our proposed Threat Detection Model (TDM) is 82.65%.