 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-Aware Quantitative Risk Assessment Machine Learning Model for Drivers Distraction
Feb 20, 2024
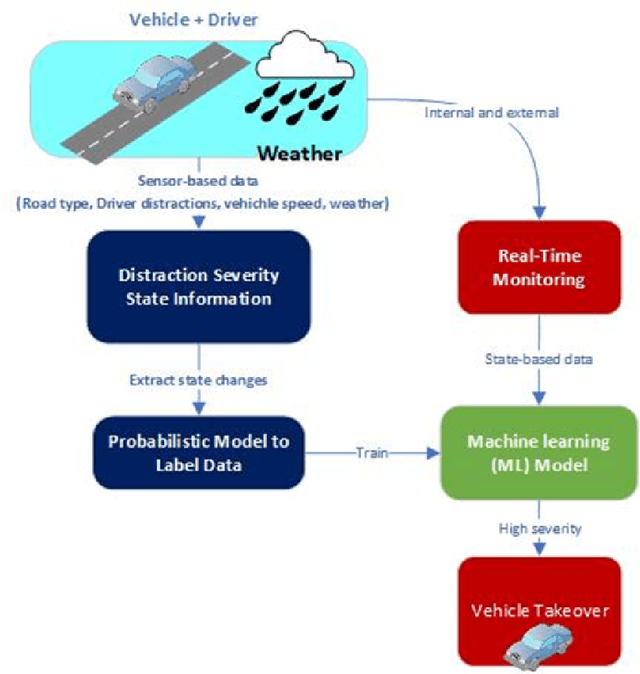

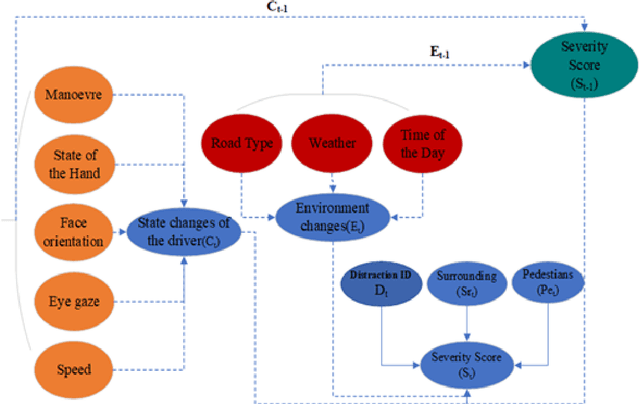
Risk mitigation techniques are critical to avoiding accidents associated with driving behaviour. We provide a novel Multi-Class Driver Distraction Risk Assessment (MDDRA) model that considers the vehicle, driver, and environmental data during a journey. MDDRA categorises the driver on a risk matrix as safe, careless, or dangerous. It offers flexibility in adjusting the parameters and weights to consider each event on a specific severity level. We collect real-world data using the Field Operation Test (TeleFOT), covering drivers using the same routes in the East Midlands, United Kingdom (UK). The results show that reducing road accidents caused by driver distraction is possible. We also study the correlation between distraction (driver, vehicle, and environment) and the classification severity based on a continuous distraction severity score. Furthermore, we apply machine learning techniques to classify and predict driver distraction according to severity levels to aid the transition of control from the driver to the vehicle (vehicle takeover) when a situation is deemed risky. The Ensemble Bagged Trees algorithm performed best, with an accuracy of 96.2%.