Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToolpath design for additive manufacturing using deep reinforcement learning
Sep 30, 2020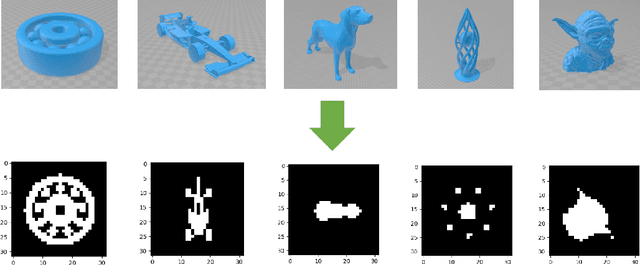
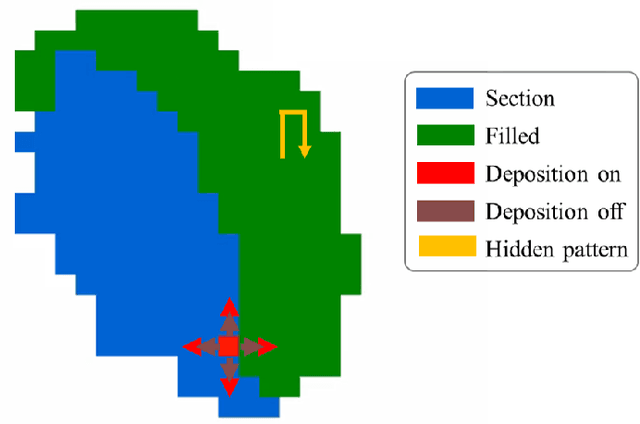


Toolpath optimization of metal-based additive manufacturing processes is currently hampered by the high-dimensionality of its design space. In this work, a reinforcement learning platform is proposed that dynamically learns toolpath strategies to build an arbitrary part. To this end, three prominent model-free reinforcement learning formulations are investigated to design additive manufacturing toolpaths and demonstrated for two cases of dense and sparse reward structures. The results indicate that this learning-based toolpath design approach achieves high scores, especially when a dense reward structure is present.
* 8 pages, 4 figures
Via