 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel Road-Aware Line-of-Sight Probability Model for Urban Air Mobility
Aug 27, 2024
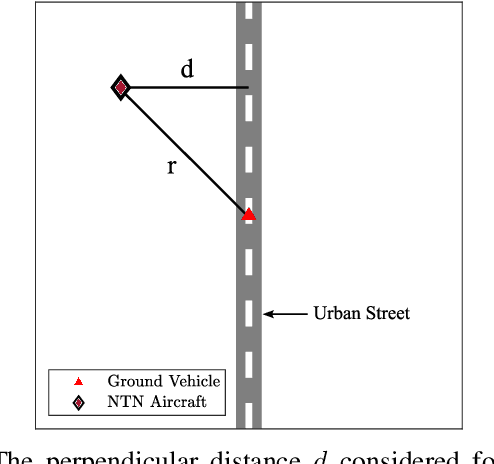


As urban air mobility (UAM) emerges as a transformative solution to urban transportation, the demand for robust communication frameworks capable of supporting high-density aerial traffic becomes increasingly critical. An essential area of communications improvement is reliably characterizing and minimizing interference on UAM aircraft from other aircraft and ground vehicles. To achieve this, reliable and accurate line-of-sight (LOS) models must be used. In this work, we highlight the limitations of a LOS probability model extensively used in the literature in accurately predicting interference caused by smart ground vehicles. Then, we introduce a novel probability of LOS model that improves interference prediction by incorporating the urban topography and the dynamic positioning of ground vehicles on streets. Our model's parameters are derived from extensive simulations and validated through real-world urban settings to ensure reliability and applicability.
Aerial-Aided mmWave VANETs Using NOMA: Performance Analysis, Comparison, and Insights
Oct 17, 2023In this paper, we propose the integration of tethered flying platforms in cooperative vehicular ad hoc networks (VANETs) to alleviate the problems of rapid urbanization. In this context, we study the performance of VANETs by deriving approximate outage probability and average achievable rate expressions using tools from stochastic geometry. We compare between the usage of networked tethered flying platforms (NTFPs) and traditional roadside units (RSUs). On the other hand, the rapid increase of smart devices in vehicles and the upcoming urban air mobility (UAM) vision will congest the spectrum and require increased data rates. Hence, we use non-orthogonal multiple access (NOMA) to improve spectral efficiency and compare its performance to orthogonal access schemes. Furthermore, we utilize millimeter-wave (mmWave) frequencies for high data rates and implement a sectored beamforming model. We extensively study the system using three transmission schemes: direct, relay, and hybrid transmission. The results show that when acting as relays, NTFPs outperform RSUs for larger distances between the transmitting and the receiving vehicles, while RSUs outperform NTFPs for short distances. However, NTFPs are the best solution when acting as a source. Moreover, we find that, in most cases, direct transmission is preferred to achieve a high rate compared to other schemes. Finally, the results are summarized in two tables that provide insights into connecting VANETs by selecting the most suitable platform and type of communication for a given set of parameters, configurations, and requirements.
Technological Trends and Key Communication Enablers for eVTOLs
Oct 17, 2021
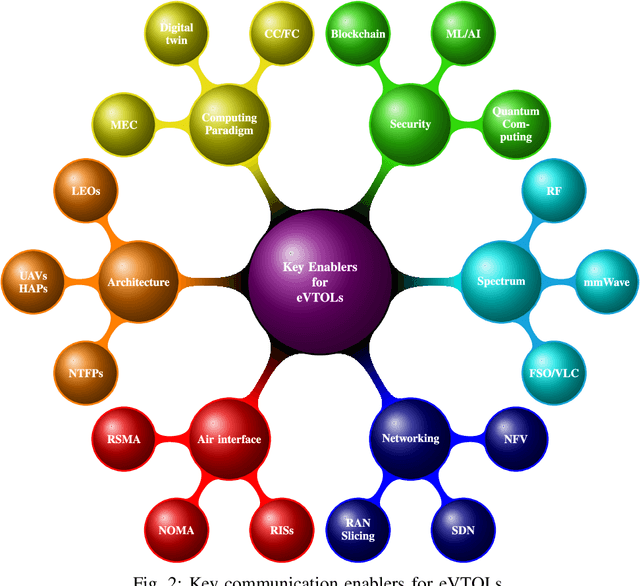
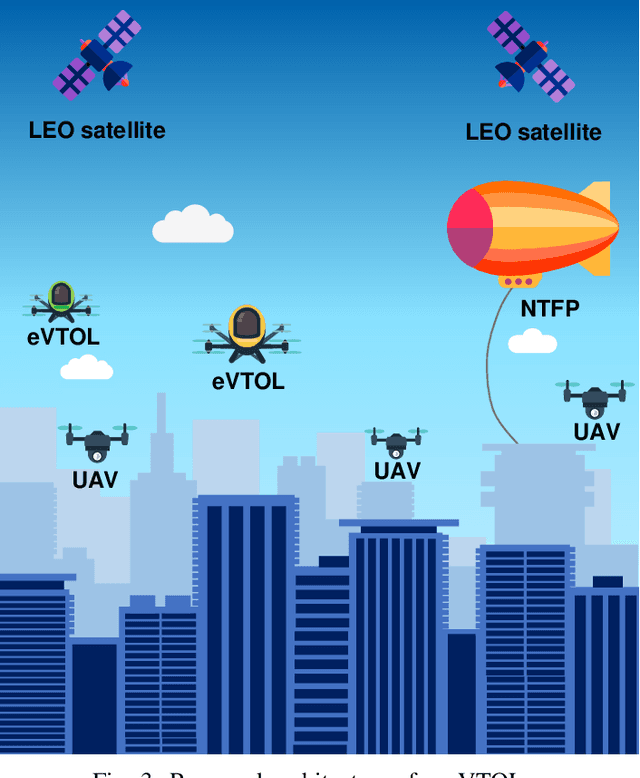
The world is looking for a new exciting form of transportation that will cut our travel times considerably. In 2021, the time has come for flying cars to become the new transportation system of this century. Electric vertical take-off and landing (eVTOL) vehicles, which are a type of flying cars, are predicted to be used for passenger and package transportation in dense cities. In order to fly safely and reliably, wireless communications for eVTOLs must be developed with stringent eVTOL communication requirements. Indeed, their communication needs to be ultra-reliable, secure with ultra-high data rate and low latency to fulfill various tasks such as autonomous driving, sharing a massive amount of data in a short amount of time, and high-level communication security. In this paper, we propose major key communication enablers for eVTOLs ranging from the architecture, air-interface, networking, frequencies, security, and computing. To show the relevance and the impact of one of the key enablers, we carried out comparative simulations to show the superiority compared to the current technology. We compared the usage of an air-based communication infrastructure with a tower mast in a realistic scenario involving eVTOLs, delivery drones, pedestrians, and vehicles.