 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Paradigm for Feasibility Guarantees in Legged Locomotion
Nov 16, 2020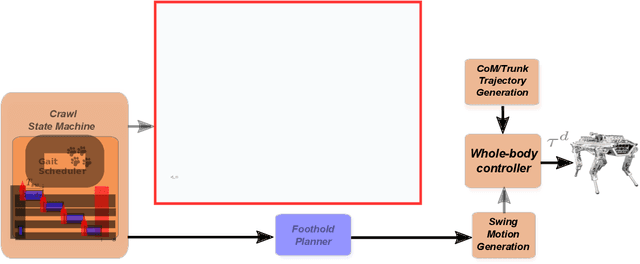
Developing feasible body trajectories for legged systems on arbitrary terrains is a challenging task. Given some contact points, the trajectories for the Center of Mass (CoM) and body orientation, designed to move the robot, must satisfy crucial constraints to maintain balance, and to avoid violating physical actuation and kinematic limits. In this paper, we present a paradigm that allows to design feasible trajectories in an efficient manner. In continuation to our previous work, we extend the notion of the 2D feasible region, where static balance and the satisfaction of actuation limits were guaranteed, whenever the projection of the CoM lies inside the proposed admissible region. We here develop a general formulation of the improved feasible region to guarantee dynamic balance alongside the satisfaction of both actuation and kinematic limits for arbitrary terrains in an efficient manner. To incorporate the feasibility of the kinematic limits, we introduce an algorithm that computes the reachable region of the CoM. Furthermore, we propose an efficient planning strategy that utilizes the improved feasible region to design feasible CoM and body orientation trajectories. Finally, we validate the capabilities of the improved feasible region and the effectiveness of the proposed planning strategy, using simulations and experiments on the HyQ robot and comparing them to a previously developed heuristic approach. Various scenarios and terrains that mimic confined and challenging environments are used for the validation.