 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVTrackIt: A Synthetic Self-Driving Dataset with Infrastructure and Pooled Vehicle Information
Jul 15, 2022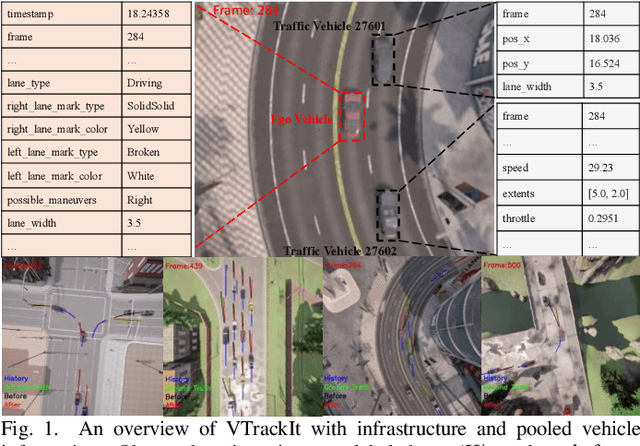
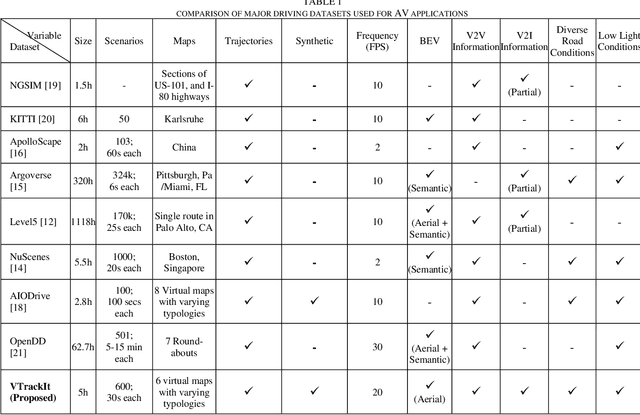
Artificial intelligence solutions for Autonomous Vehicles (AVs) have been developed using publicly available datasets such as Argoverse, ApolloScape, Level5, and NuScenes. One major limitation of these datasets is the absence of infrastructure and/or pooled vehicle information like lane line type, vehicle speed, traffic signs, and intersections. Such information is necessary and not complementary to eliminating high-risk edge cases. The rapid advancements in Vehicle-to-Infrastructure and Vehicle-to-Vehicle technologies show promise that infrastructure and pooled vehicle information will soon be accessible in near real-time. Taking a leap in the future, we introduce the first comprehensive synthetic dataset with intelligent infrastructure and pooled vehicle information for advancing the next generation of AVs, named VTrackIt. We also introduce the first deep learning model (InfraGAN) for trajectory predictions that considers such information. Our experiments with InfraGAN show that the comprehensive information offered by VTrackIt reduces the number of high-risk edge cases. The VTrackIt dataset is available upon request under the Creative Commons CC BY-NC-SA 4.0 license at http://vtrackit.irda.club.
RMOPP: Robust Multi-Objective Post-Processing for Effective Object Detection
Feb 09, 2021
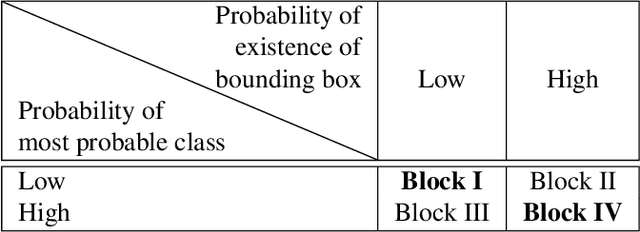

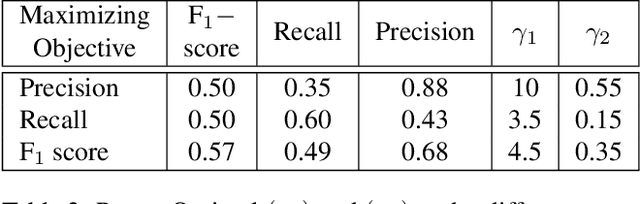
Over the last few decades, many architectures have been developed that harness the power of neural networks to detect objects in near real-time. Training such systems requires substantial time across multiple GPUs and massive labeled training datasets. Although the goal of these systems is generalizability, they are often impractical in real-life applications due to flexibility, robustness, or speed issues. This paper proposes RMOPP: A robust multi-objective post-processing algorithm to boost the performance of fast pre-trained object detectors with a negligible impact on their speed. Specifically, RMOPP is a statistically driven, post-processing algorithm that allows for simultaneous optimization of precision and recall. A unique feature of RMOPP is the Pareto frontier that identifies dominant possible post-processed detectors to optimize for both precision and recall. RMOPP explores the full potential of a pre-trained object detector and is deployable for near real-time predictions. We also provide a compelling test case on YOLOv2 using the MS-COCO dataset.
The Sparse Reverse of Principal Component Analysis for Fast Low-Rank Matrix Completion
Oct 04, 2019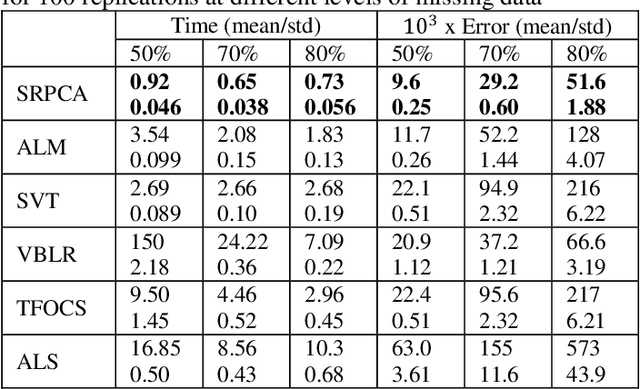
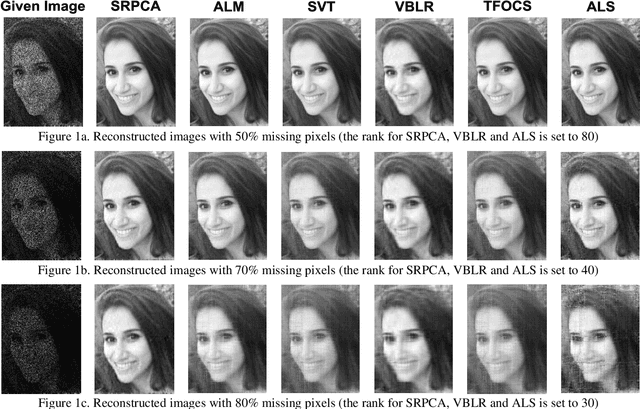
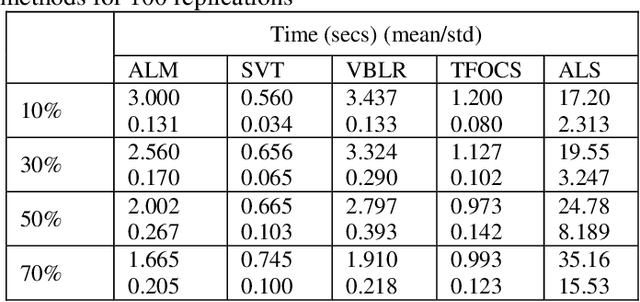
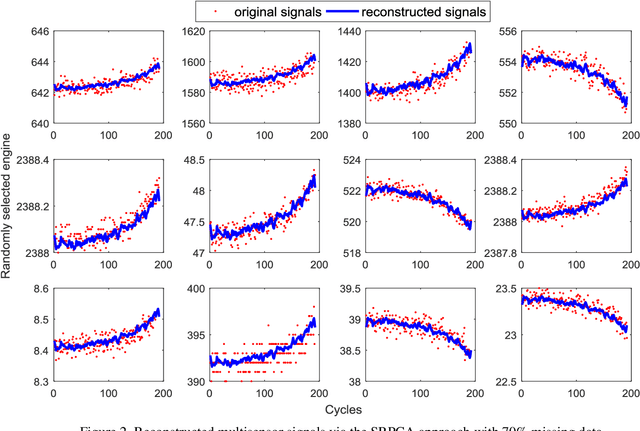
Matrix completion constantly receives tremendous attention from many research fields. It is commonly applied for recommender systems such as movie ratings, computer vision such as image reconstruction or completion, multi-task learning such as collaboratively modeling time-series trends of multiple sensors, and many other applications. Matrix completion techniques are usually computationally exhaustive and/or fail to capture the heterogeneity in the data. For example, images usually contain a heterogeneous set of objects, and thus it is a challenging task to reconstruct images with high levels of missing data. In this paper, we propose the sparse reverse of principal component analysis for matrix completion. The proposed approach maintains smoothness across the matrix, produces accurate estimates of the missing data, converges iteratively, and it is computationally tractable with a controllable upper bound on the number of iterations until convergence. The accuracy of the proposed technique is validated on natural images, movie ratings, and multisensor data. It is also compared with common benchmark methods used for matrix completion.