 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOdyssey: An Automotive Lidar-Inertial Odometry Dataset for GNSS-denied situations
Dec 16, 2025
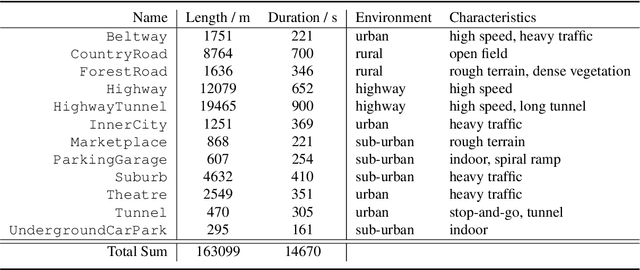
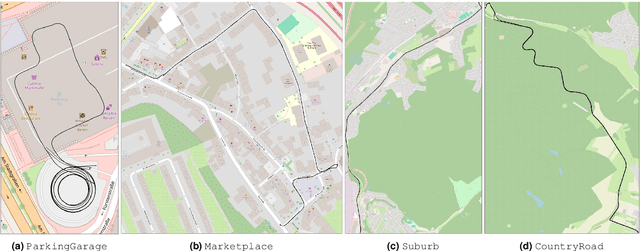

The development and evaluation of Lidar-Inertial Odometry (LIO) and Simultaneous Localization and Mapping (SLAM) systems requires a precise ground truth. The Global Navigation Satellite System (GNSS) is often used as a foundation for this, but its signals can be unreliable in obstructed environments due to multi-path effects or loss-of-signal. While existing datasets compensate for the sporadic loss of GNSS signals by incorporating Inertial Measurement Unit (IMU) measurements, the commonly used Micro-Electro-Mechanical Systems (MEMS) or Fiber Optic Gyroscope (FOG)-based systems do not permit the prolonged study of GNSS-denied environments. To close this gap, we present Odyssey, a LIO dataset with a focus on GNSS-denied environments such as tunnels and parking garages as well as other underrepresented, yet ubiquitous situations such as stop-and-go-traffic, bumpy roads and wide open fields. Our ground truth is derived from a navigation-grade Inertial Navigation System (INS) equipped with a Ring Laser Gyroscope (RLG), offering exceptional bias stability characteristics compared to IMUs used in existing datasets and enabling the prolonged and accurate study of GNSS-denied environments. This makes Odyssey the first publicly available dataset featuring a RLG-based INS. Besides providing data for LIO, we also support other tasks, such as place recognition, through the threefold repetition of all trajectories as well as the integration of external mapping data by providing precise geodetic coordinates. All data, dataloader and other material is available online at https://odyssey.uni-goettingen.de/ .
Lidar-only Odometry based on Multiple Scan-to-Scan Alignments over a Moving Window
Mar 27, 2025Lidar-only odometry considers the pose estimation of a mobile robot based on the accumulation of motion increments extracted from consecutive lidar scans. Many existing approaches to the problem use a scan-to-map registration, which neglects the accumulation of errors within the maintained map due to drift. Other methods use a refinement step that jointly optimizes the local map on a feature basis. We propose a solution that avoids this by using multiple independent scan-to-scan Iterative Closest Points (ICP) registrations to previous scans in order to derive constraints for a pose graph. The optimization of the pose graph then not only yields an accurate estimate for the latest pose, but also enables the refinement of previous scans in the optimization window. By avoiding the need to recompute the scan-to-scan alignments, the computational load is minimized. Extensive evaluation on the public KITTI and MulRan datasets as well as on a custom automotive lidar dataset is carried out. Results show that the proposed approach achieves state-of-the-art estimation accuracy, while alleviating the mentioned issues.