 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDictionary-Based Contrastive Learning for GNSS Jamming Detection
Dec 08, 2025Global Navigation Satellite System (GNSS) signals are fundamental in applications across navigation, transportation, and industrial networks. However, their extremely low received power makes them highly vulnerable to radio-frequency interference (RFI) and intentional jamming. Modern data-driven methods offer powerful representational power for such applications, however real-time and reliable jamming detection on resource-limited embedded receivers remains a key challenge due to the high computational and memory demands of the conventional learning paradigm. To address these challenges, this work presents a dictionary-based contrastive learning (DBCL) framework for GNSS jamming detection that integrates transfer learning, contrastive representation learning, and model compression techniques. The framework combines tuned contrastive and dictionary-based loss functions to enhance feature separability under low-data conditions and applies structured pruning and knowledge distillation to reduce model complexity while maintaining high accuracy. Extensive evaluation across varying data regimes demonstrate that the proposed algorithm consistently outperforms modern CNN, MobileViT, and ResNet-18 architectures. The framework achieves a substantial reduction in memory footprint and inference latency, confirming its suitability for real-time, low-power GNSS interference detection on embedded platforms.
EMORF-II: Adaptive EM-based Outlier-Robust Filtering with Correlated Measurement Noise
Sep 09, 2025We present a learning-based outlier-robust filter for a general setup where the measurement noise can be correlated. Since it is an enhanced version of EM-based outlier robust filter (EMORF), we call it as EMORF-II. As it is equipped with an additional powerful feature to learn the outlier characteristics during inference along with outlier-detection, EMORF-II has improved outlier-mitigation capability. Numerical experiments confirm performance gains as compared to the state-of-the-art methods in terms of accuracy with an increased computational overhead. However, thankfully the computational complexity order remains at par with other practical methods making it a useful choice for diverse applications.
Robust Filtering -- Novel Statistical Learning and Inference Algorithms with Applications
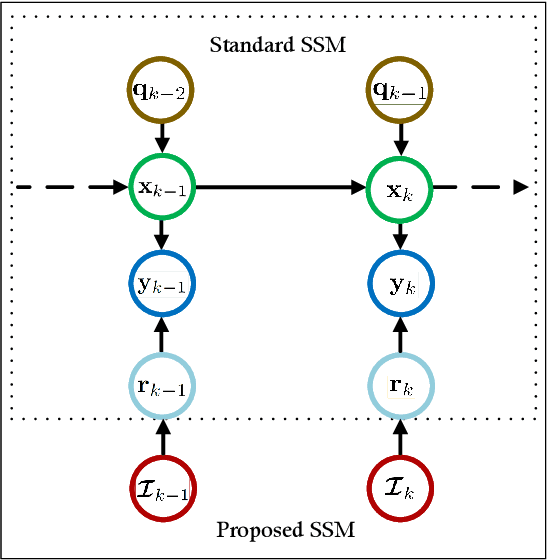
Jun 13, 2025State estimation or filtering serves as a fundamental task to enable intelligent decision-making in applications such as autonomous vehicles, robotics, healthcare monitoring, smart grids, intelligent transportation, and predictive maintenance. Standard filtering assumes prior knowledge of noise statistics to extract latent system states from noisy sensor data. However, real-world scenarios involve abnormalities like outliers, biases, drifts, and missing observations with unknown or partially known statistics, limiting conventional approaches. This thesis presents novel robust nonlinear filtering methods to mitigate these challenges. Based on insights from our filtering proposals, we extend the formulations to offline estimation/learning setups and propose smoothing extensions. Our methods leverage Bayesian inference frameworks, employing both deterministic and stochastic approximation techniques including Variational Inference (VI) and Particle Filters/Sequential Monte Carlo (SMC). We also study theoretical estimation limits using Bayesian Cram\'er-Rao bounds (BCRBs) in the context of measurement abnormalities. To validate the performance gains of the proposed methods, we perform simulations and experiments in scenarios including target tracking, indoor localization, 3D point cloud registration, mesh registration, and pose graph optimization. The fundamental nature of the work makes it useful in diverse applications, with possible future extensions toward developing outlier-robust machine learning pipelines, learning system dynamics from anomalous data, and addressing challenges in generative AI where standard diffusion models struggle with outliers, imbalanced datasets, and mode collapse.
Trajectory Reconstruction through a Gaussian Adaptive Selective Outlier Rejecting Smoother
Oct 27, 2024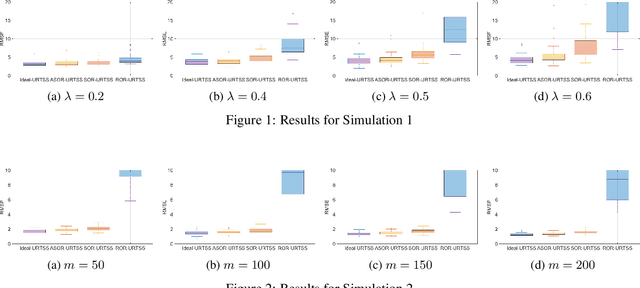

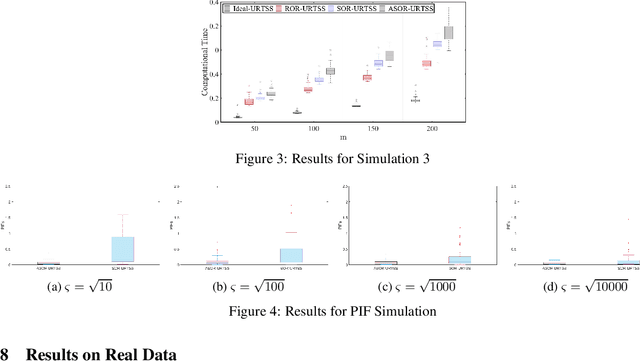
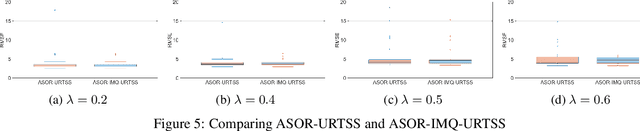
Trajectory Reconstruction (TR) is vital for accurately mapping movement patterns and validating analyses, especially in fields like robotics, biomechanics, and environmental tracking, where data might be missing or affected by outliers. Improving Trajectory estimation by employing Gaussian smoothing techniques in the presence of non-Gaussian noise is the subject of this work. We consider the case where data is collected from independent sensors. A variational Bayesian (VB) based Unscented Raunch-Tung-Striebel smoothing (URTSS) scheme is proposed which adopts a vectorized weighing mechanism for the measurement covariance matrix to selectively remove contaminated measurements at each time step. To improve our outlier mitigation, we model our outlier characteristics as a Gamma distribution and dynamically learn the parameters of this distribution from data. We verify the performance of our proposed smoother by a range of simulations and experimental data. We also propose a robustness criterion for smoothers based on the Kullback-Leibler (KL) divergence and show that our proposed method complies with this criterion.
EMORF/S: EM-Based Outlier-Robust Filtering and Smoothing With Correlated Measurement Noise
Jul 05, 2023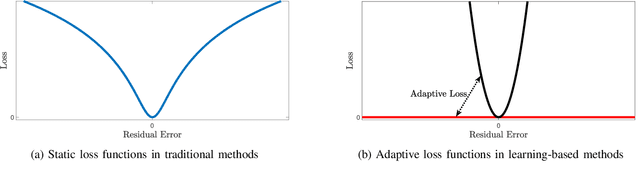
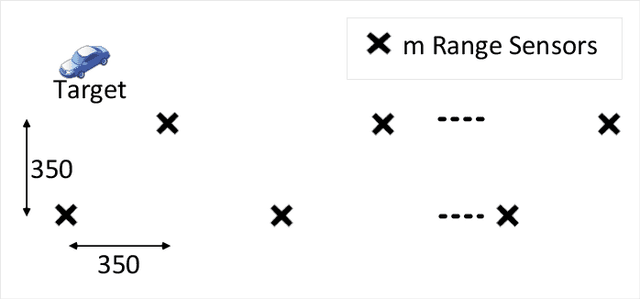
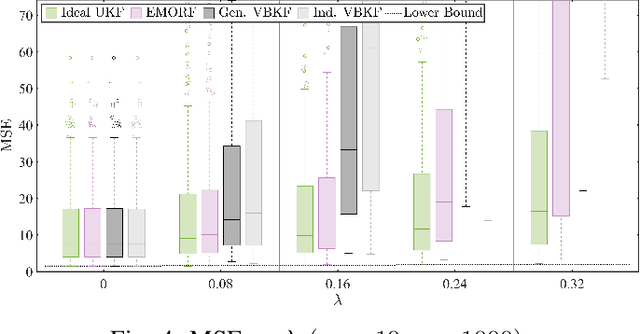
In this article, we consider the problem of outlier-robust state estimation where the measurement noise can be correlated. Outliers in data arise due to many reasons like sensor malfunctioning, environmental behaviors, communication glitches, etc. Moreover, noise correlation emerges in several real-world applications e.g. sensor networks, radar data, GPS-based systems, etc. We consider these effects in system modeling which is subsequently used for inference. We employ the Expectation-Maximization (EM) framework to derive both outlier-resilient filtering and smoothing methods, suitable for online and offline estimation respectively. The standard Gaussian filtering and the Gaussian Rauch-Tung-Striebel (RTS) smoothing results are leveraged to devise the estimators. In addition, Bayesian Cramer-Rao Bounds (BCRBs) for a filter and a smoother which can perfectly detect and reject outliers are presented. These serve as useful theoretical benchmarks to gauge the error performance of different estimators. Lastly, different numerical experiments, for an illustrative target tracking application, are carried out that indicate performance gains compared to similarly engineered state-of-the-art outlier-rejecting state estimators. The advantages are in terms of simpler implementation, enhanced estimation quality, and competitive computational performance.
Bayesian Heuristics for Robust Spatial Perception
Dec 01, 2022

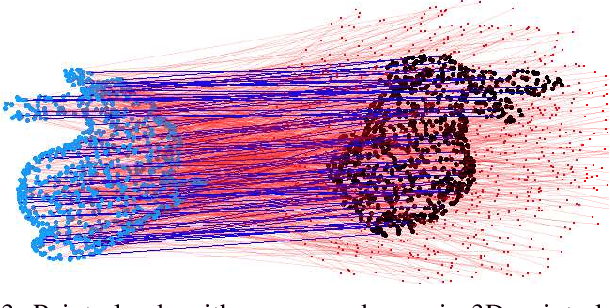
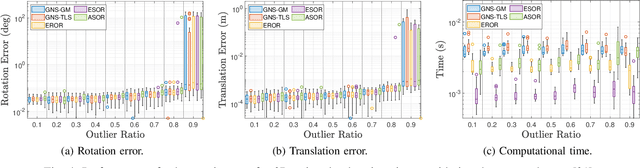
Spatial perception is a key task in several robotics applications. In general, it involves the nonlinear estimation of hidden variables that represent the state of the robot/environment. However, in the presence of outliers the standard nonlinear least squared formulation results in poor estimates. Several methods have been considered in the literature to improve the reliability of the estimation process. Most methods are based on heuristics since guaranteed global robust estimation is not generally practical due to high computational costs. Recently general purpose robust estimation heuristics have been proposed that leverage existing non-minimal solvers available for the outlier-free formulations without the need for an initial guess. In this work, we propose two similar heuristics backed by Bayesian theory. We evaluate these heuristics in practical scenarios to demonstrate their merits in different applications including 3D point cloud registration, mesh registration and pose graph optimization.
Outlier-Robust Filtering For Nonlinear Systems With Selective Observations Rejection
Jun 10, 2021
This letter presents a novel outlier-robust filter for nonlinear dynamical systems. We consider a common case where measurements are obtained from independent sensors. The proposed method is devised by modifying the measurement model and subsequently using the theory of Variational Bayes and general Gaussian filtering. We treat the measurement outliers independently for independent observations leading to selective rejection of the corrupted observations during inference. By carrying out simulations for variable number of sensors we verify that an implementation of the proposed filter is computationally more efficient as compared to similar baseline methods.