 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward collision-free trajectory for autonomous and pilot-controlled unmanned aerial vehicles
Sep 18, 2023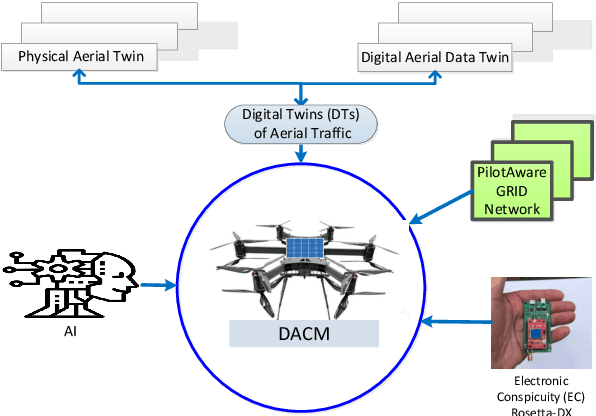


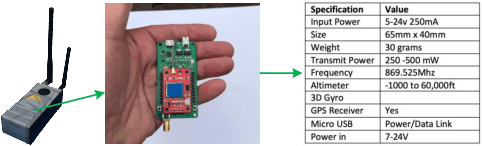
For drones, as safety-critical systems, there is an increasing need for onboard detect & avoid (DAA) technology i) to see, sense or detect conflicting traffic or imminent non-cooperative threats due to their high mobility with multiple degrees of freedom and the complexity of deployed unstructured environments, and subsequently ii) to take the appropriate actions to avoid collisions depending upon the level of autonomy. The safe and efficient integration of UAV traffic management (UTM) systems with air traffic management (ATM) systems, using intelligent autonomous approaches, is an emerging requirement where the number of diverse UAV applications is increasing on a large scale in dense air traffic environments for completing swarms of multiple complex missions flexibly and simultaneously. Significant progress over the past few years has been made in detecting UAVs present in aerospace, identifying them, and determining their existing flight path. This study makes greater use of electronic conspicuity (EC) information made available by PilotAware Ltd in developing an advanced collision management methodology -- Drone Aware Collision Management (DACM) -- capable of determining and executing a variety of time-optimal evasive collision avoidance (CA) manoeuvres using a reactive geometric conflict detection and resolution (CDR) technique. The merits of the DACM methodology have been demonstrated through extensive simulations and real-world field tests in avoiding mid-air collisions (MAC) between UAVs and manned aeroplanes. The results show that the proposed methodology can be employed successfully in avoiding collisions while limiting the deviation from the original trajectory in highly dynamic aerospace without requiring sophisticated sensors and prior training.