 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy of Robust Resource Allocation in Cell-Free Multiple-Antenna Networks
May 17, 2025


Cell-free networks outperform cellular networks in many aspects, yet their efficiency is affected by imperfect channel state information (CSI). In order to address this issue, this work presents a robust resource allocation framework designed for the downlink of user-centric cell-free massive multi-input multi-output (CF-mMIMO) networks. This framework employs a sequential resource allocation strategy with a robust user scheduling algorithm designed to maximize the sum-rate of the network and two robust power allocation algorithms aimed at minimizing the mean square error, which are developed to mitigate the effects of imperfect CSI. An analysis of the proposed robust resource allocation problems is developed along with a study of their computational cost. Simulation results demonstrate the effectiveness of the proposed robust resource allocation algorithms, showing a performance improvement of up to 30\% compared to existing techniques.
Tomlinson-Harashima Cluster-Based Precoders for Cell-Free MU-MIMO Networks
Dec 26, 2023Cell-free (CF) multiple-input multiple-output (MIMO) systems generally employ linear precoding techniques to mitigate the effects of multiuser interference. However, the power loss, efficiency, and precoding accuracy of linear precoders are usually improved by replacing them with nonlinear precoders that employ perturbation and modulo operation. In this work, we propose nonlinear user-centric precoders for CF MIMO, wherein different clusters of access points (APs) serve different users in CF multiple-antenna networks. Each cluster of APs is selected based on large-scale fading coefficients. The clustering procedure results in a sparse nonlinear precoder. We further devise a reduced-dimension nonlinear precoder, where clusters of users are created to reduce the complexity of the nonlinear precoder, the amount of required signaling, and the number of users. Numerical experiments show that the proposed nonlinear techniques for CF systems lead to an enhanced performance when compared to their linear counterparts.
Implementation of a neural network for non-linearities estimation in a tail-sitter aircraft
Oct 12, 2020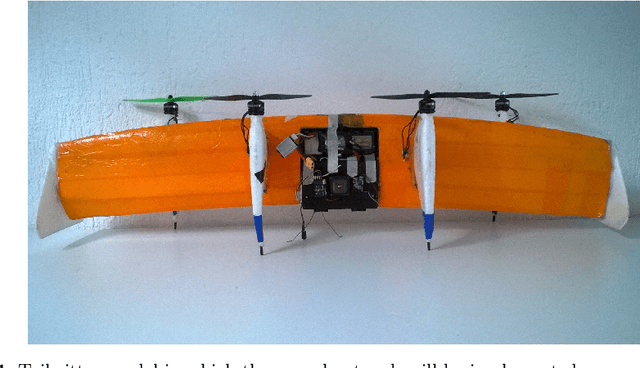
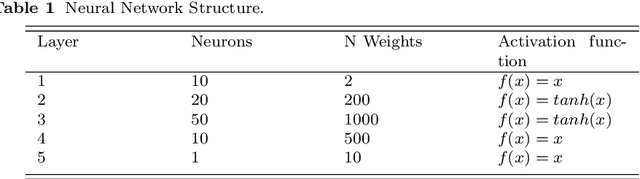
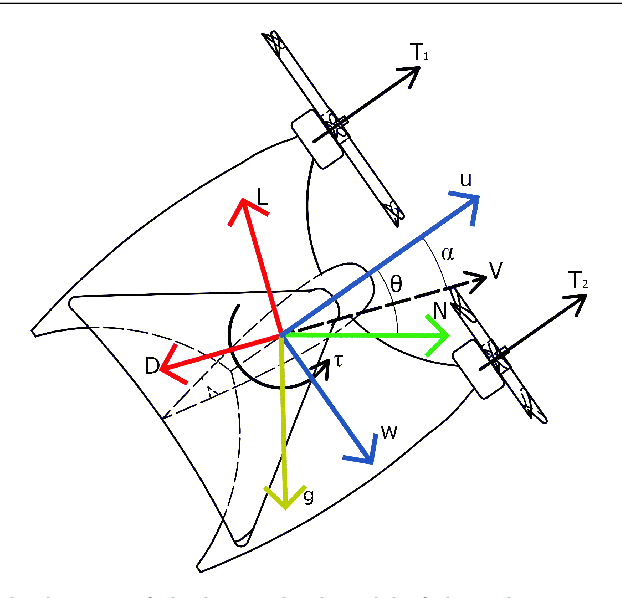
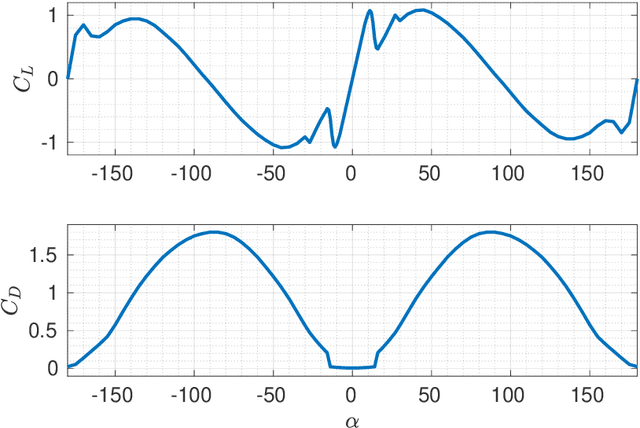
The control of a tail-sitter aircraft is a challenging task, especially during transition maneuver where the lift and drag forces are highly nonlinear. In this work, we implement a Neural Network (NN) capable of estimate such nonlinearities. Once they are estimated, one can propose a control scheme where these forces can correctly feed-forwarded. Our implementation of the NN has been programmed in C++ on the PX4 Autopilot an open-source autopilot for drones. To ensure that this implementation does not considerably affect the autopilot's performance, the coded NN must be of a light computational load. With the aim to test our approach, we have carried out a series of realistic simulations in the Software in The Loop (SITL) using the PX4 Autopilot. These experiments demonstrate that the implemented NN can be used to estimate the tail-sitter aerodynamic forces, and can be used to improve the control algorithms during all the flight phases of the tail-sitter aircraft: hover, cruise flight, and transition.
Study of Set-Membership Adaptive Kernel Algorithms
Aug 15, 2018



In the last decade, a considerable research effort has been devoted to developing adaptive algorithms based on kernel functions. One of the main features of these algorithms is that they form a family of universal approximation techniques, solving problems with nonlinearities elegantly. In this paper, we present data-selective adaptive kernel normalized least-mean square (KNLMS) algorithms that can increase their learning rate and reduce their computational complexity. In fact, these methods deal with kernel expansions, creating a growing structure also known as the dictionary, whose size depends on the number of observations and their innovation. The algorithms described herein use an adaptive step-size to accelerate the learning and can offer an excellent tradeoff between convergence speed and steady state, which allows them to solve nonlinear filtering and estimation problems with a large number of parameters without requiring a large computational cost. The data-selective update scheme also limits the number of operations performed and the size of the dictionary created by the kernel expansion, saving computational resources and dealing with one of the major problems of kernel adaptive algorithms. A statistical analysis is carried out along with a computational complexity analysis of the proposed algorithms. Simulations show that the proposed KNLMS algorithms outperform existing algorithms in examples of nonlinear system identification and prediction of a time series originating from a nonlinear difference equation.