 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementation of a neural network for non-linearities estimation in a tail-sitter aircraft
Paper and Code
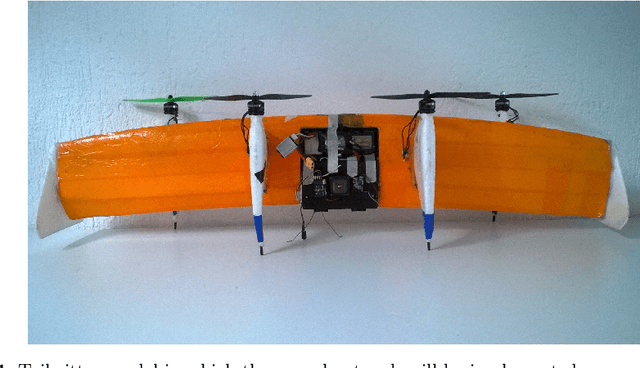
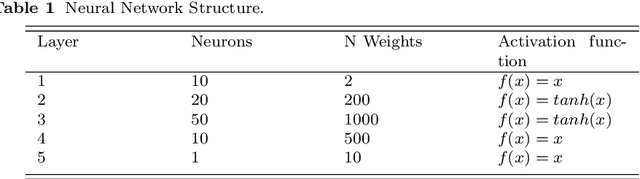
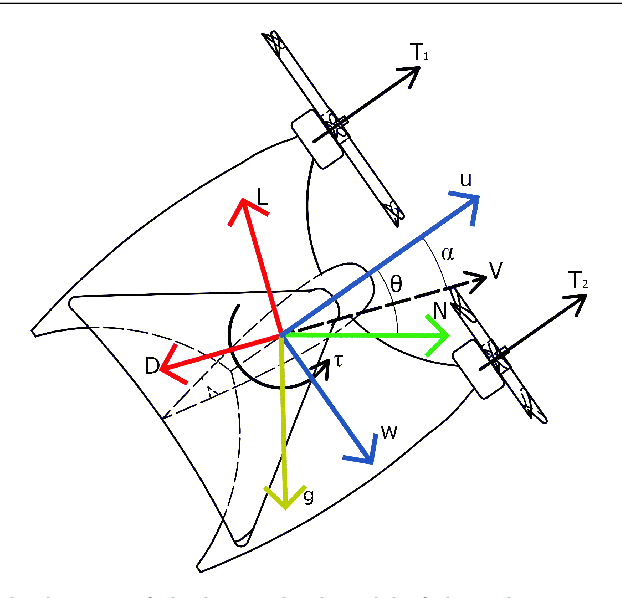
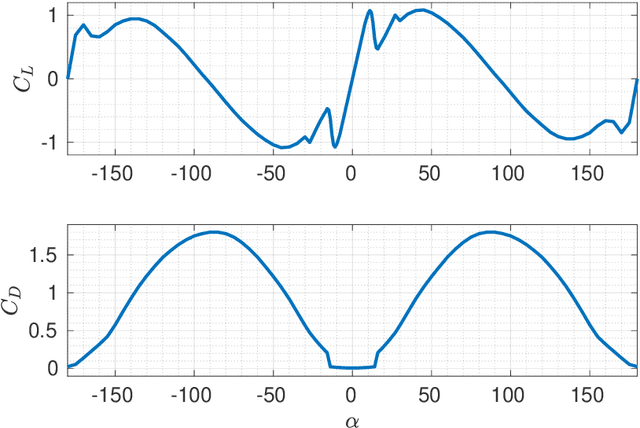
The control of a tail-sitter aircraft is a challenging task, especially during transition maneuver where the lift and drag forces are highly nonlinear. In this work, we implement a Neural Network (NN) capable of estimate such nonlinearities. Once they are estimated, one can propose a control scheme where these forces can correctly feed-forwarded. Our implementation of the NN has been programmed in C++ on the PX4 Autopilot an open-source autopilot for drones. To ensure that this implementation does not considerably affect the autopilot's performance, the coded NN must be of a light computational load. With the aim to test our approach, we have carried out a series of realistic simulations in the Software in The Loop (SITL) using the PX4 Autopilot. These experiments demonstrate that the implemented NN can be used to estimate the tail-sitter aerodynamic forces, and can be used to improve the control algorithms during all the flight phases of the tail-sitter aircraft: hover, cruise flight, and transition.