Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat is in the scene? A Hybrid Deep Boltzmann Machine For Contextualized Scene Modeling
Aug 20, 2018
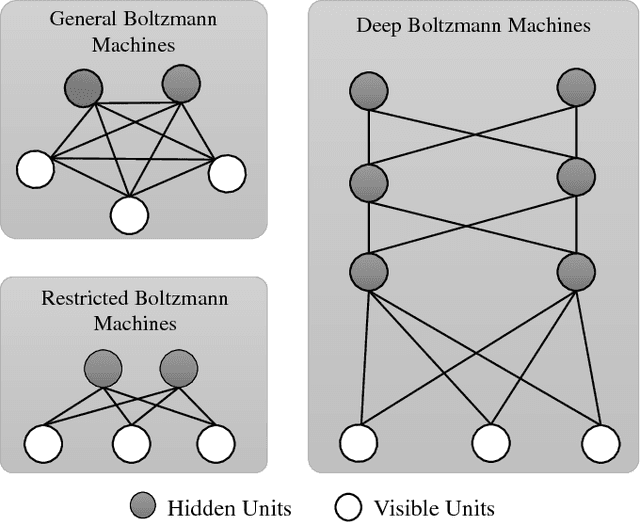
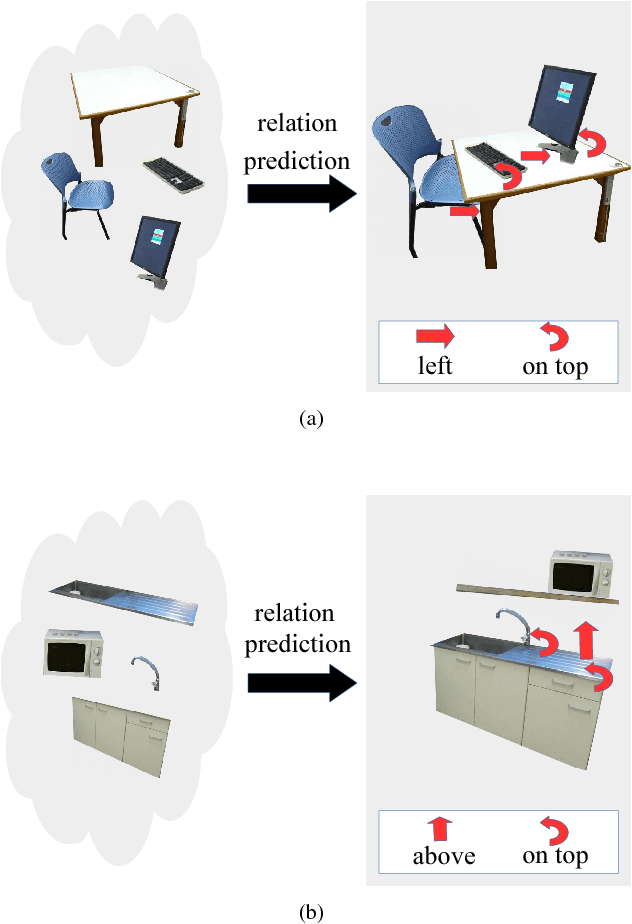
Scene models allow robots to reason about what is in the scene, what else should be in it, and what should not be in it. In this paper, we propose a hybrid Boltzmann Machine (BM) for scene modeling where relations between objects are integrated. To be able to do that, we extend BM to include tri-way edges between visible (object) nodes and make the network to share the relations across different objects. We evaluate our method against several baseline models (Deep Boltzmann Machines, and Restricted Boltzmann Machines) on a scene classification dataset, and show that it performs better in several scene reasoning tasks.
* 6 pages, 7 figures, submitted to ICRA 2018
Via