 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot generalization using cascaded system-representations
Paper and Code
Dec 11, 2019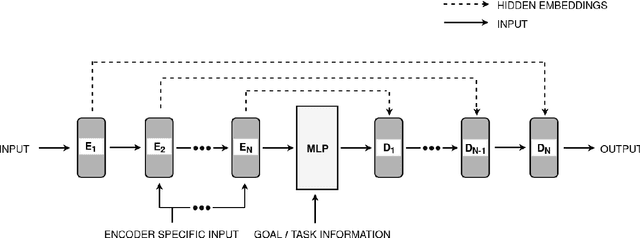
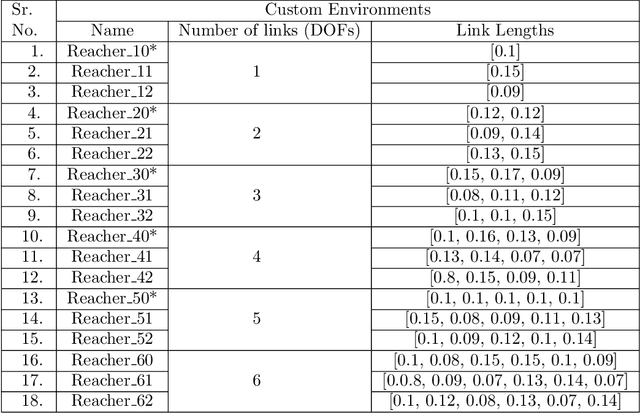
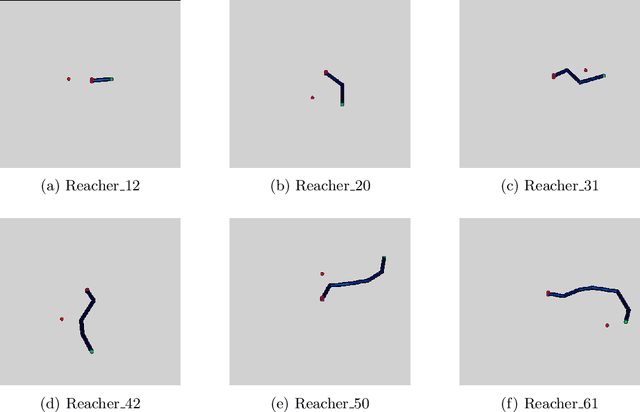
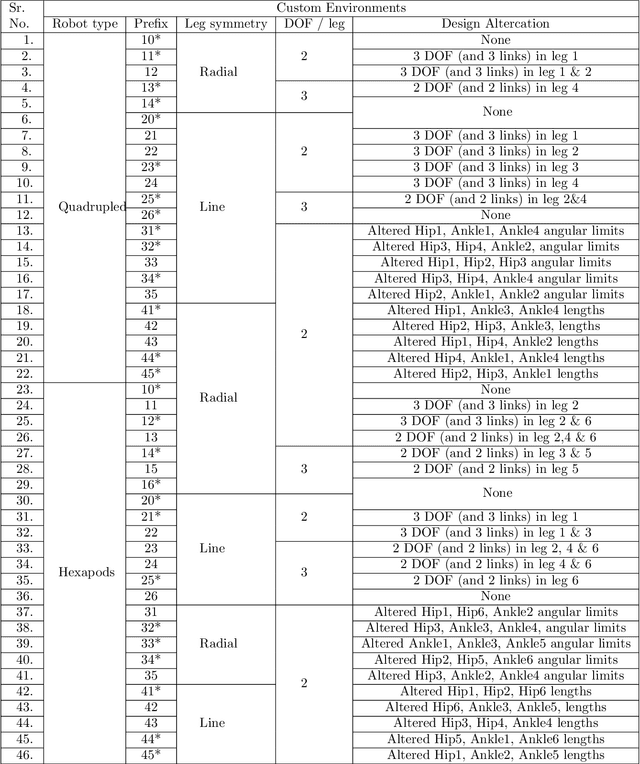
This paper proposes a new framework named CASNET to learn control policies that generalize over similar robot types with different morphologies. The proposed framework leverages the structural similarities in robots to learn general-purpose system-representations. These representations can then be used with the choice of learning algorithms to learn policies that generalize over different robots. The learned policies can be used to design general-purpose robot-controllers that are applicable to a wide variety of robots. We demonstrate the effectiveness of the proposed framework by learning control policies for two separate domains: planer manipulation and legged locomotion. The policy learned for planer manipulation is capable of controlling planer manipulators with varying degrees of freedom and link-lengths. For legged locomotion, the learned policy generalizes over different morphologies of the crawling robots. These policies perform on-par with the expert policies trained for individual robot models and achieves zero-shot generalization on models unseen during training, establishing that the final performance of the general policy is bottlenecked by the learning algorithm rather than the proposed framework.