 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhole-Body Control for Velocity-Controlled Mobile Collaborative Robots Using Coupling Dynamic Movement Primitives
Paper and Code
Mar 07, 2022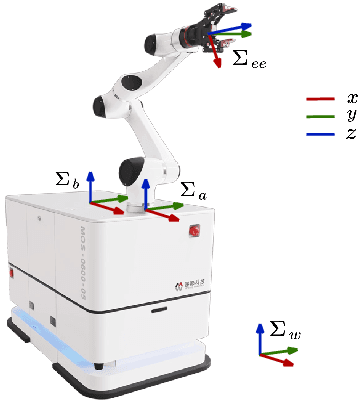
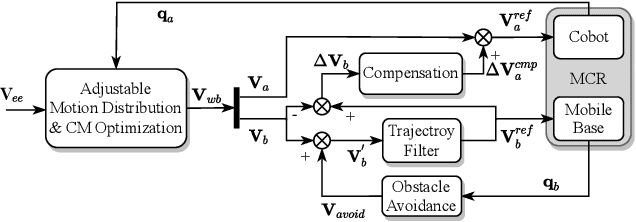
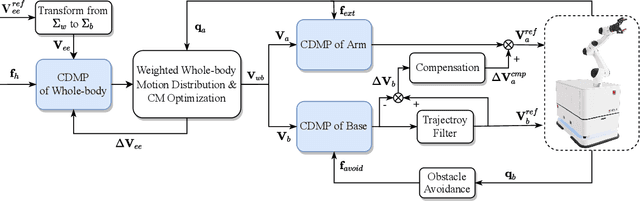
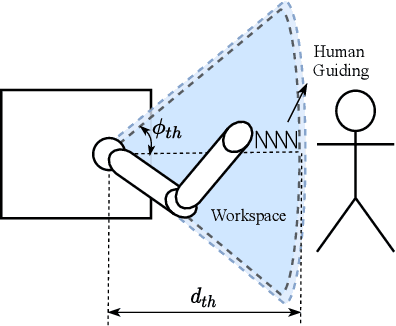
In this paper, we propose a unified whole-body control framework for velocity-controlled mobile collaborative robots which can distribute task motion into the base and arm according to specific task requirements by adjusting weighting factors. Our framework focuses on addressing two challenging issues in whole-body coordination: 1) different dynamic characteristics of base and arm; 2) avoidance of violating constraints of both safety and configuration. In addition, our controller involves Coupling Dynamic Movement Primitive to enable the essential compliance capabilities for collaboration and interaction applications, such as obstacle avoidance, hand guiding, and force control. Based on these, we design a motion mode of intuitive physical human-robot interaction through an adjusting strategy of the weighting factors. The proposed controller is in closed-form and thus quite computationally efficient against the-state-of-art optimization-based methods. Experimental results of a real mobile collaborative robot validate the effectiveness of the proposed controller. The documented video of the experiments is available at https://youtu.be/x2Z593dV9C8.