 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose
Paper and Code
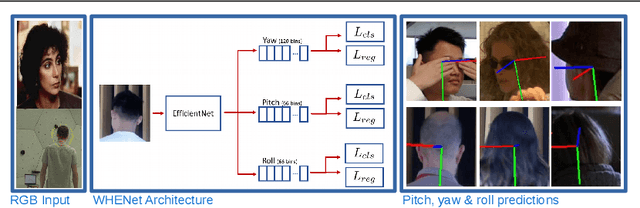
We present an end-to-end head-pose estimation network designed to predict Euler angles through the full range head yaws from a single RGB image. Existing methods perform well for frontal views but few target head pose from all viewpoints. This has applications in autonomous driving and retail. Our network builds on multi-loss approaches with changes to loss functions and training strategies adapted to wide range estimation. Additionally, we extract ground truth labelings of anterior views from a current panoptic dataset for the first time. The resulting Wide Headpose Estimation Network (WHENet) is the first fine-grained modern method applicable to the full-range of head yaws (hence wide) yet also meets or beats state-of-the-art methods for frontal head pose estimation. Our network is compact and efficient for mobile devices and applications.