 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat to Do When You Can't Do It All: Temporal Logic Planning with Soft Temporal Logic Constraints
Paper and Code
Aug 05, 2020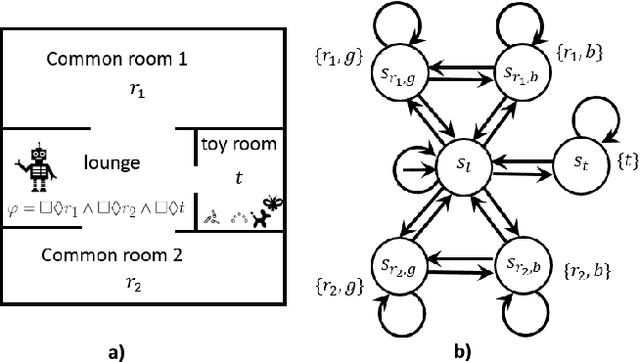

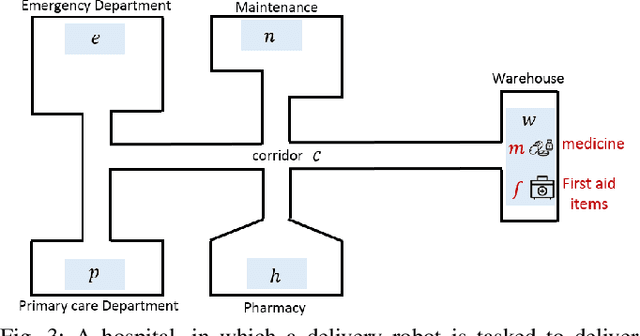

In this paper, we consider a temporal logic planning problem in which the objective is to find an infinite trajectory that satisfies an optimal selection from a set of soft specifications expressed in linear temporal logic (LTL) while nevertheless satisfying a hard specification expressed in LTL. Our previous work considered a similar problem in which linear dynamic logic for finite traces (LDLf), rather than LTL, was used to express the soft constraints. In that work, LDLf was used to impose constraints on finite prefixes of the infinite trajectory. By using LTL, one is able not only to impose constraints on the finite prefixes of the trajectory, but also to set `soft' goals across the entirety of the infinite trajectory. Our algorithm first constructs a product automaton, on which the planning problem is reduced to computing a lasso with minimum cost. Among all such lassos, it is desirable to compute a shortest one. Though we prove that computing such a shortest lasso is computationally hard, we also introduce an efficient greedy approach to synthesize short lassos nonetheless. We present two case studies describing an implementation of this approach, and report results of our experiment comparing our greedy algorithm with an optimal baseline.