 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly-Supervised Object Detection Learning through Human-Robot Interaction
Paper and Code
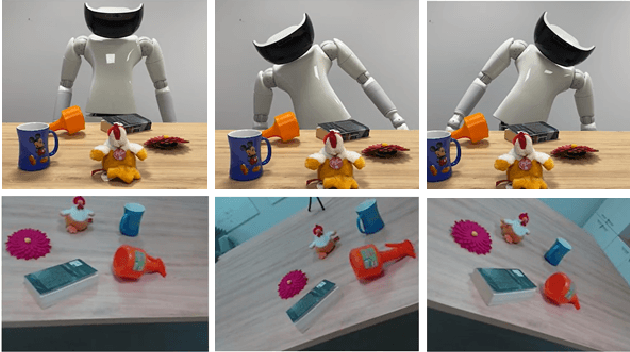
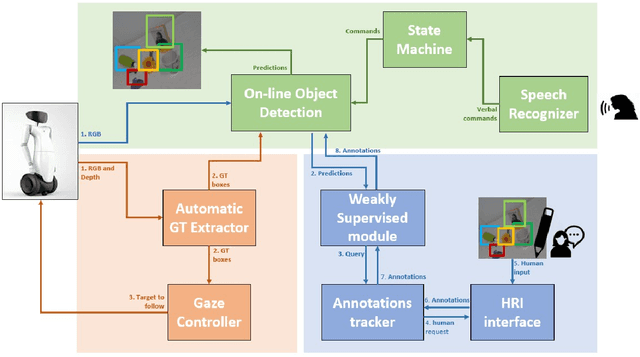
Reliable perception and efficient adaptation to novel conditions are priority skills for humanoids that function in dynamic environments. The vast advancements in latest computer vision research, brought by deep learning methods, are appealing for the robotics community. However, their adoption in applied domains is not straightforward since adapting them to new tasks is strongly demanding in terms of annotated data and optimization time. Nevertheless, robotic platforms, and especially humanoids, present opportunities (such as additional sensors and the chance to explore the environment) that can be exploited to overcome these issues. In this paper, we present a pipeline for efficiently training an object detection system on a humanoid robot. The proposed system allows to iteratively adapt an object detection model to novel scenarios, by exploiting: (i) a teacher-learner pipeline, (ii) weakly supervised learning techniques to reduce the human labeling effort and (iii) an on-line learning approach for fast model re-training. We use the R1 humanoid robot for both testing the proposed pipeline in a real-time application and acquire sequences of images to benchmark the method. We made the code of the application publicly available.