 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Goal-Directed Meta-Learning with Contextual Planning Networks
Paper and Code
Nov 18, 2021


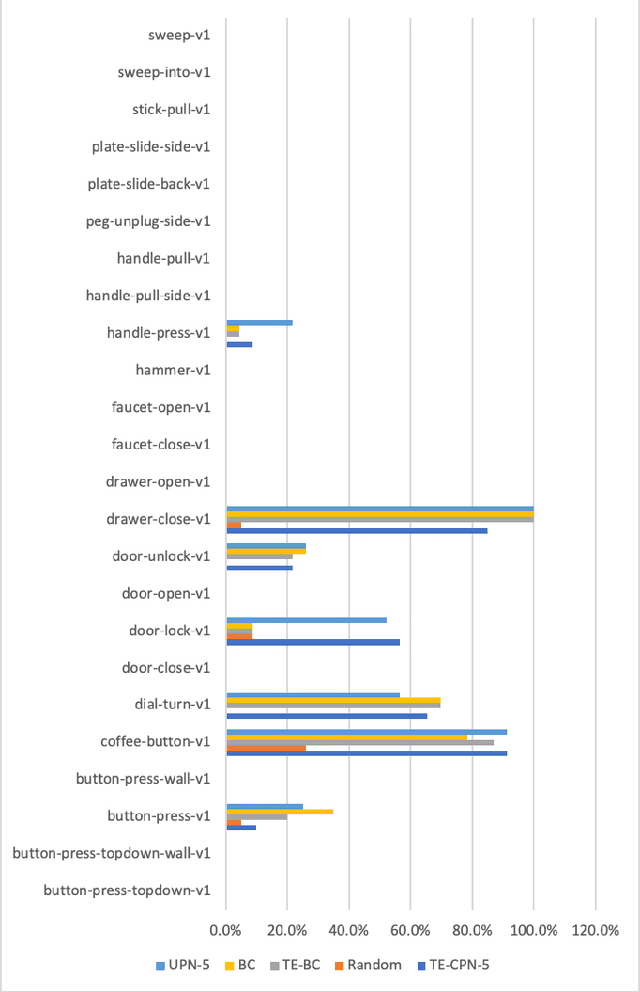
The goal of meta-learning is to generalize to new tasks and goals as quickly as possible. Ideally, we would like approaches that generalize to new goals and tasks on the first attempt. Toward that end, we introduce contextual planning networks (CPN). Tasks are represented as goal images and used to condition the approach. We evaluate CPN along with several other approaches adapted for zero-shot goal-directed meta-learning. We evaluate these approaches across 24 distinct manipulation tasks using Metaworld benchmark tasks. We found that CPN outperformed several approaches and baselines on one task and was competitive with existing approaches on others. We demonstrate the approach on a physical platform on Jenga tasks using a Kinova Jaco robotic arm.