 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Trajectory Prediction in City-scale Road Networks using a Direction-based Sequence-to-Sequence Model with Spatiotemporal Attention Mechanisms
Paper and Code
Jun 21, 2021


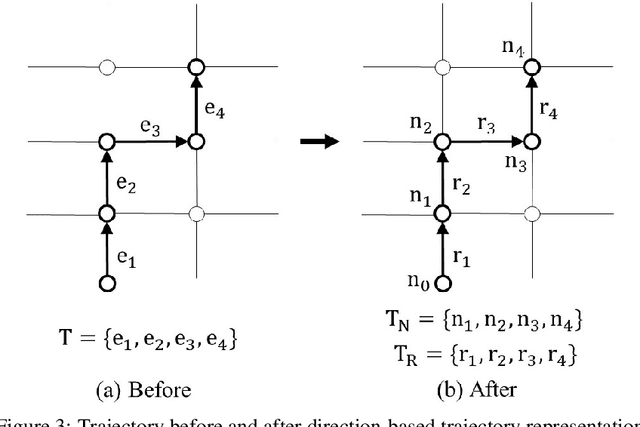
Trajectory prediction of vehicles at the city scale is of great importance to various location-based applications such as vehicle navigation, traffic management, and location-based recommendations. Existing methods typically represent a trajectory as a sequence of grid cells, road segments or intention sets. None of them is ideal, as the cell-based representation ignores the road network structures and the other two are less efficient in analyzing city-scale road networks. In addition, most models focus on predicting the immediate next position, and are difficult to generalize for longer sequences. To address these problems, we propose a novel sequence-to-sequence model named D-LSTM (Direction-based Long Short-Term Memory), which represents each trajectory as a sequence of intersections and associated movement directions, and then feeds them into a LSTM encoder-decoder network for future trajectory generation. Furthermore, we introduce a spatial attention mechanism to capture dynamic spatial dependencies in road networks, and a temporal attention mechanism with a sliding context window to capture both short- and long-term temporal dependencies in trajectory data. Extensive experiments based on two real-world large-scale taxi trajectory datasets show that D-LSTM outperforms the existing state-of-the-art methods for vehicle trajectory prediction, validating the effectiveness of the proposed trajectory representation method and spatiotemporal attention mechanisms.