 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Recurrent Models for Solving Partially Observable Control Tasks
Paper and Code
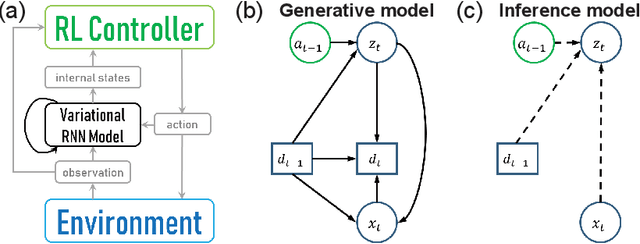
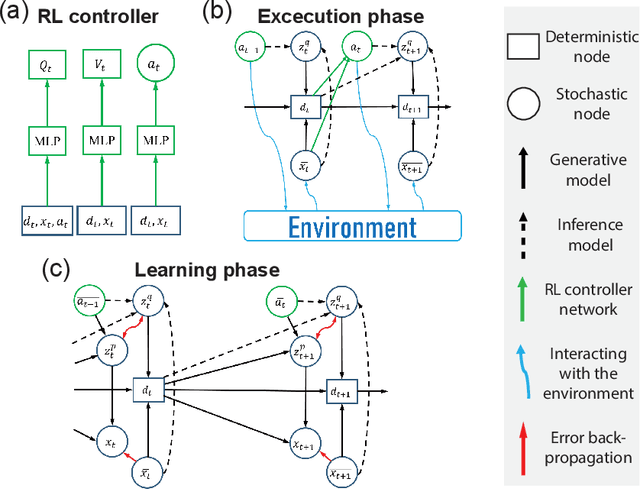
In partially observable (PO) environments, deep reinforcement learning (RL) agents often suffer from unsatisfactory performance, since two problems need to be tackled together: how to extract information from the raw observations to solve the task, and how to improve the policy. In this study, we propose an RL algorithm for solving PO tasks. Our method comprises two parts: a variational recurrent model (VRM) for modeling the environment, and an RL controller that has access to both the environment and the VRM. The proposed algorithm was tested in two types of PO robotic control tasks, those in which either coordinates or velocities were not observable and those that require long-term memorization. Our experiments show that the proposed algorithm achieved better data efficiency and/or learned more optimal policy than other alternative approaches in tasks in which unobserved states cannot be inferred from raw observations in a simple manner.