Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtilization of Deep Reinforcement Learning for saccadic-based object visual search
Paper and Code
Oct 20, 2016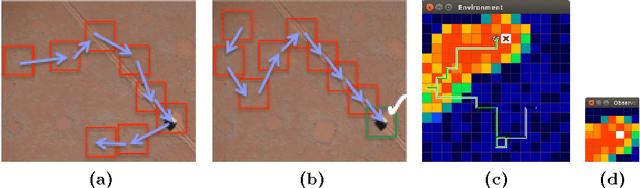
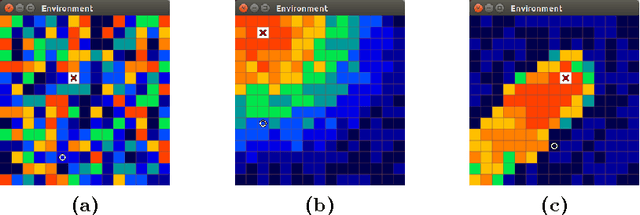
The paper focuses on the problem of learning saccades enabling visual object search. The developed system combines reinforcement learning with a neural network for learning to predict the possible outcomes of its actions. We validated the solution in three types of environment consisting of (pseudo)-randomly generated matrices of digits. The experimental verification is followed by the discussion regarding elements required by systems mimicking the fovea movement and possible further research directions.
* Paper submitted to special session on Machine Intelligence organized
during 23rd International AUTOMATION Conference
View paper on