Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing monodromy to statistically estimate the number of solutions
Paper and Code
Apr 24, 2020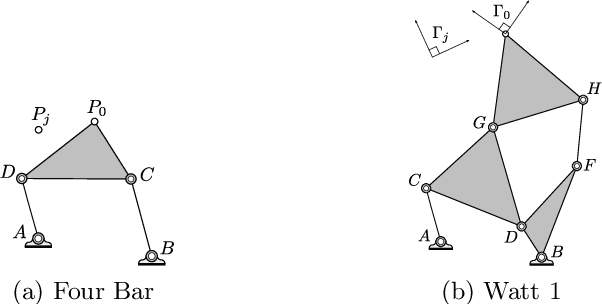

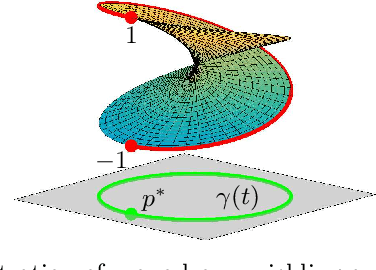
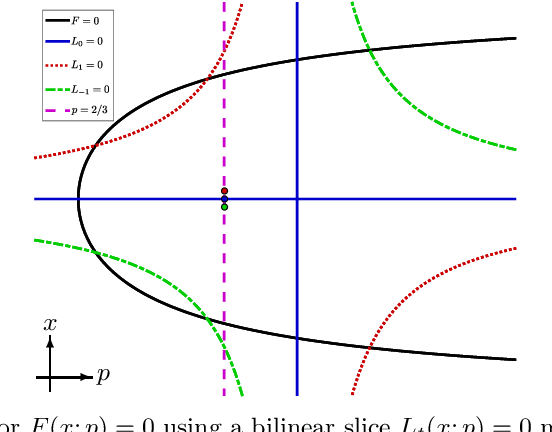
Synthesis problems for linkages in kinematics often yield large structured parameterized polynomial systems which generically have far fewer solutions than traditional upper bounds would suggest. This paper describes statistical models for estimating the generic number of solutions of such parameterized polynomial systems. The new approach extends previous work on success ratios of parameter homotopies to using monodromy loops as well as the addition of a trace test that provides a stopping criterion for validating that all solutions have been found. Several examples are presented demonstrating the method including Watt I six-bar motion generation problems.
* 8 pages, 7 figures, submitted to IMA Conference on Mathematics of
Robotics
View paper on